Cinématique parallèle
Trépied avec axes linéaires
Ce système comporte trois entraînements linéaires qui forment un angle défini l'un par rapport à l'autre. Les entraînements se composent de 3 rails avec des glissières de déplacement. Le plateau porte-outils est relié aux coulisseaux traversants par des bielles de même longueur. Un ensemble apparié de bielles maintient la plaque d'outil parallèle au sol dans la même orientation. La cinématique permet de déplacer le plateau porte-outil en trois dimensions.
La transformation directe et inverse de ces cinématiques est calculée dans le SMC_Trafo_Tripod_Lin et SMC_TrafoF_Tripod_Lin POU. L'angle d'axe du trépied est défini par l'angle entre le rail et l'axe vertical (dAxisAngle).
Exigences mécaniques et système de coordonnées
Les longueurs des 3 axes sont identiques.
Les longueurs des bielles sont identiques.
La distance entre les paires de bielles entre elles est identique pour toutes les paires.
L'angle d'axe entre les rails d'entraînement et l'axe vertical est identique pour les trois entraînements. La tolérance d'angle est comprise entre 0° et 90°.
L'axe définit le mouvement du point entre les joints de bielle sur les curseurs.
Le système de coordonnées XYZ est droitier. Les vecteurs X et Y sont horizontaux et Z pointe vers le haut. L'origine est définie de sorte que les intersections des trois axes de déplacement avec le plan XY (graphiques ci-dessous : points A) soient sur un cercle à la position [0,0,0].
Nom | La description |
|---|---|
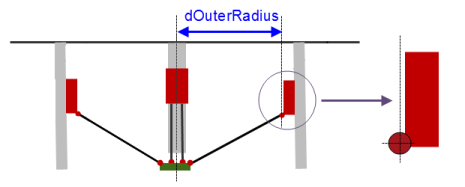
| Distance du centre de la plaque porte-outils aux points de préhension des bielles 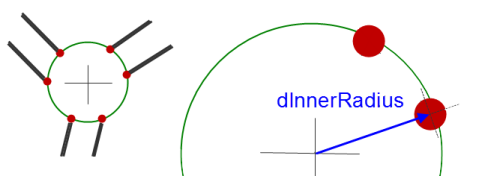 |
| 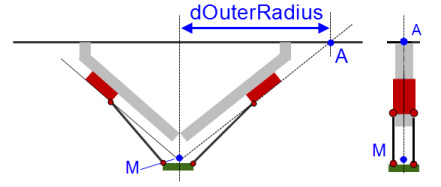 Le point A est l'intersection de l'axe avec le plan XY. |
| Longueur des bielles |
| Distance entre les deux bielles d'une paire |
| Le point A du premier axe définit l'axe X par défaut. Le décalage est utilisé pour faire pivoter toute la structure autour de l'axe Z. Dans ce cas, le point A n'est plus sur l'axe X. 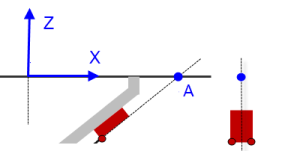 |
| Le décalage est utilisé pour définir la valeur de position de l'axe sur son réglage par défaut de zéro. 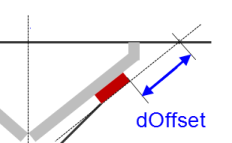 |
| |
| |
Vous trouverez des informations sur d'autres paramètres dans la description de la bibliothèque. | |
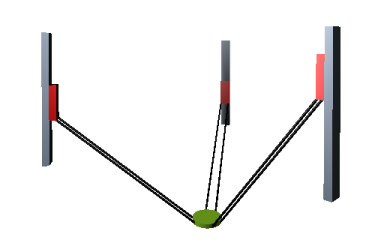
Trépied à axes verticaux
Ce système est une variante spéciale de la conception cinématique décrite ci-dessus et a les mêmes exigences mécaniques. L'angle dAxisAngle entre les rails de guidage et l'axe vertical est de 0° et les rails de guidage sont parallèles à l'axe vertical.
La transformation directe et inverse de ces cinématiques est calculée dans le SMC_Trafo_Tripod_Lin et SMC_TrafoF_Tripod_Lin blocs fonctionnels. L'angle d'axe du trépied est défini par l'angle entre le rail et l'axe vertical (dAxisAngle).
Nom | La description |
|---|---|
| Le paramètre définit le rayon du cercle qui est décrit par les six points de préhension des bielles à la plaque porte-outil. 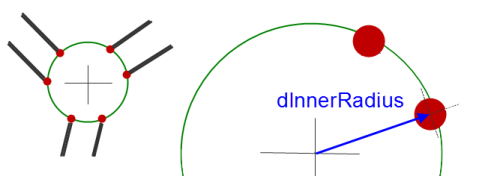 |
|  |
| Longueur des bielles |
| Distance des paires de bielles entre elles |
| Le point A du premier axe définit l'axe X par défaut. Le décalage est utilisé pour faire pivoter toute la structure autour de l'axe Z. Dans ce cas, le point A n'est plus sur l'axe X. 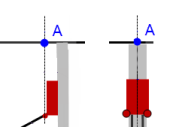 |
| Le décalage est utilisé pour définir la valeur de position de l'axe sur son réglage par défaut de zéro. 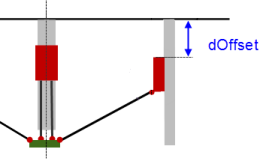 |
| |
| |
Vous trouverez des informations sur d'autres paramètres dans la description de la bibliothèque. | |
Trépied avec axes rotatifs
Pour les trépieds, la cinématique est mise en œuvre par 3 entraînements rotatifs qui sont reliés au plateau porte-outil par des bras et des bielles.
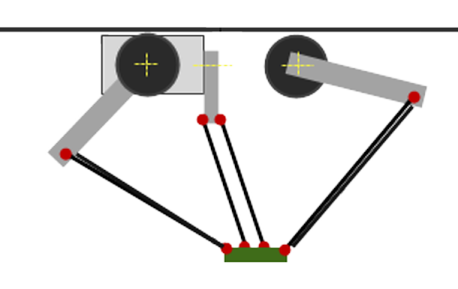
L'origine du système de coordonnées est l'emplacement du centre de la plaque porte-outils lorsque les 3 bras sont en position horizontale.
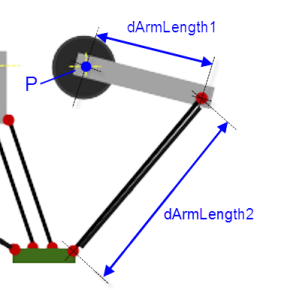
La transformation directe et inverse de ces cinématiques est calculée dans le SMC_TRAFO_Tripod_Arm et SMC_TRAFOF_Tripod_Arm blocs fonctionnels.
Exigences mécaniques et système de coordonnées
Les longueurs des trois axes sont identiques.
Les longueurs des bielles sont identiques.
La distance entre les paires de bielles entre elles est identique pour toutes les paires.
Nom | La description |
|---|---|
|  |
| |
| Le paramètre définit le rayon du cercle établi par les 3 points P des entraînements. 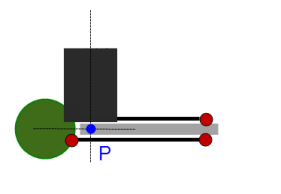 |
| Le paramètre définit le rayon du cercle qui est décrit par les 6 points de préhension des bielles à la plaque porte-outil. 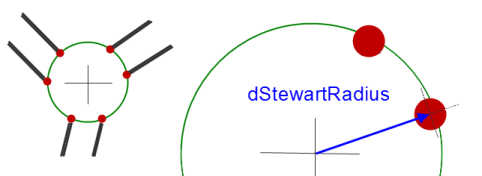 |
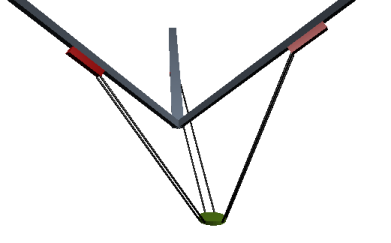
| Distance entre les deux bielles d'une paire |
| |
| |
| |
Vous trouverez des informations sur d'autres paramètres dans la description de la bibliothèque. | |
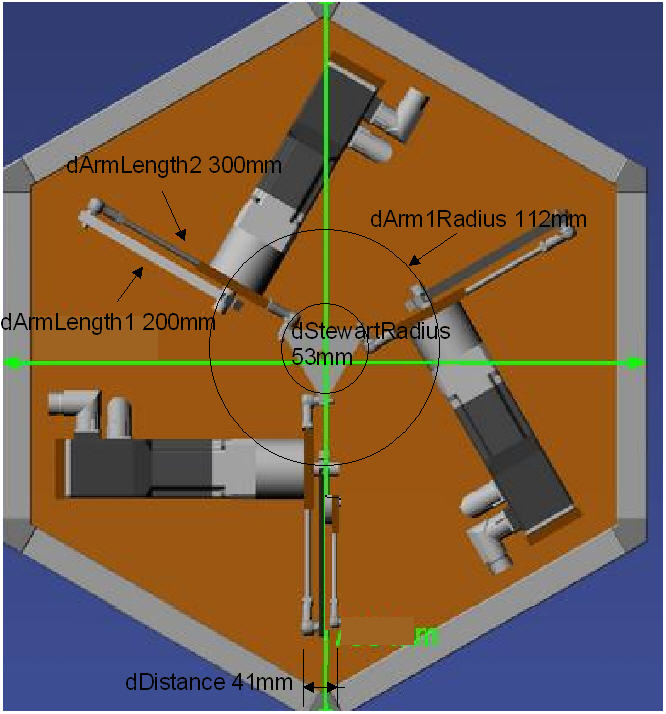
L'image montre la position zéro de tous les axes. (Les trois bras supérieurs sont horizontaux.) Le MCS est représenté sur la plaque porte-outils. Les flèches sur les axes A0, A1 et A2 indiquent le sens de rotation des entraînements selon la règle de la main droite.
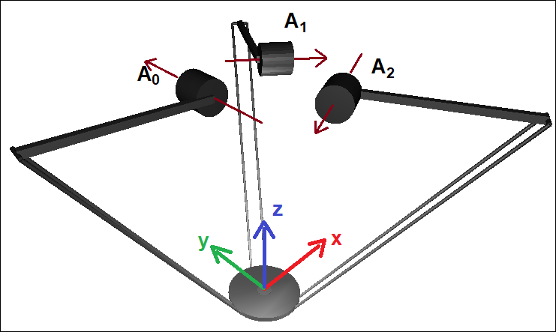
Système de coordonnées machine (MCS) | |
Origine | Défini au milieu de la plaque d'outil lorsque les 3 bras supérieurs (ceux qui sont connectés directement à A0, A1 ou A2) sont en position horizontale |
X | À partir de l'origine, pointe à l'opposé du premier moteur (A0), parallèle au segment de bras supérieur du premier bras |
Y | Déterminé par X et Z pour que le MCS soit droitier |
Z | Orthogonal à la plaque d'outil Points de la plaque à outils en direction des moteurs |
Les transformations respectives sont exécutées par les POU suivants SMC_TRAFO_Tripod_Arm et SMC_TRAFOF_Tripod_Arm:
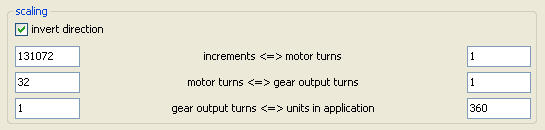
Paramètres de transformation
tta: SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60); ttaf: SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);