Transformation 5 axes
Avec la transformation 5 axes, vous pouvez contrôler une cinématique composée de trois axes spatiaux linéaires (X, Y, Z) et d'une tête d'outil. La tête de l'outil se compose de deux axes qui maintiennent l'outil. Un axe d'outil tourne autour de l'axe Z et l'outil incline les autres selon le schéma suivant.
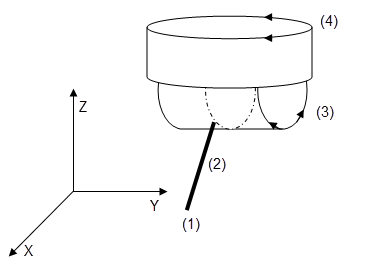
Paramètre : Longueur de dTool = Distance entre le point d'usinage (pointe d'outil = TCP) et l'inclinaison de l'axe rotatif.
Position X/Y/Z du point de traitement (TCP) inclus dans
pi.dX, pi.dY, pi.dZ. Unité : Unités de position des axes.Orientation de l'outil par des coordonnées sphériques (inclinaison et azimut) incluses dans
pi.dBetpi.dC. Unité : Degrés angulaires.
Le point de traitement (TCP) est situé à la position (
0/0/-dTool).L'outil s'étend dans la direction de l'axe Z négatif. L'inclinaison de l'axe de rotation est positionnée de manière à ce qu'une rotation dans le sens positif déplace l'outil dans la direction de l'axe X positif.
Pour le mouvement N30, l'axe d'inclinaison qui pointe en premier dans la direction X est tourné et il reste incliné dans la direction X négative à la fin du mouvement.
N0 PB360 PC360 (set axis B and C in modulo mode 360) N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100) N20 G0 X0 Y0 Z0 C0 B30 (start position) N30 G1 X20 B-30 (target position)
Pour plus d'informations, consultez : SMC_TRAFO_5Axes (FB) et SMC_TRAFOF_5Axes (FB)