Définition d'un SoftMotion Came
Une came décrit la dépendance fonctionnelle d'un entraînement (esclave) sur un autre entraînement (maître). La relation est décrite par une fonction continue (ou courbe) qui associe une plage définie de valeurs maîtres à des valeurs esclaves. Pour être plus précis : Après avoir divisé l'axe maître en segments convenables, le graphe de ces fonctions peut être représenté sur chacun de ces intervalles par une droite ou un polynôme du 5ème degré.
Les valeurs maîtres sont appliquées à l'axe horizontal et les valeurs esclaves à l'axe vertical dans le diagramme à cames.
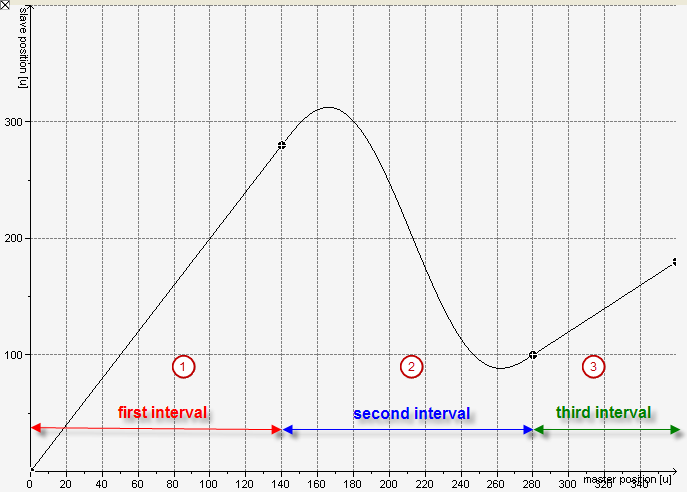
Dans l'exemple, les valeurs maîtres sont comprises entre 0 et 360. Cette plage est divisée en trois intervalles :
(1) Premier intervalle : [0, 140]
(2) Deuxième intervalle : [140, 280]
(3) Troisième intervalle : [280, 360]
La fonction (graphique) est linéaire dans les premier et troisième intervalles et son graphique est affiché sous forme de ligne. En conséquence, sa première dérivée (pente) est constante et toutes les dérivées supérieures sont égales à 0.
Dans le second intervalle, le graphe est décrit par un polynôme du 5ème degré. Par conséquent, sa première dérivée est un polynôme du 4ème degré, sa seconde dérivée (courbure) est un polynôme du 3ème degré, et sa troisième dérivée est un polynôme du 2ème degré, etc.
Lorsque la fonction décrit le mouvement de l'esclave en fonction de la position du maître, sa dérivée première correspond à la vitesse de l'esclave et la dérivée seconde à son accélération.
Lorsque vous gardez cette interprétation physique à l'esprit, il est évident que la cartographie doit être continue. Cela signifie que son graphique n'est pas autorisé à avoir de sauts. En particulier, la continuité doit également être remplie à chaque point où deux intervalles se rencontrent. De plus, la continuité en général est également requise par les dérivées première et seconde. (En fait, ces trois conditions de continuité aux points de début et de fin d'un intervalle déterminent les coefficients du polynôme du 5ème degré inséré entre deux segments de droite.
De plus, vous pouvez ajouter des poussoirs (commutateurs binaires) à la came à n'importe quelle position. De cette manière, vous pouvez créer des tables de cames contenant uniquement des poussoirs. La position de l'esclave est alors mise à zéro sur toute la plage de valeurs pilote.