Vue d'ensemble des types de segments définis
CODESYS SoftMotion fournit différents types de segments pour les cames.
En fonction de format de compilation, seuls certains types de segments sont pris en charge :
XYVA : Line et Poly5 uniquement.
Segments : tous les types de segments sont pris en charge.
Type de segment | Paramètres | Courbe |
|---|---|---|
Poly7 | . Conditions aux limites
| 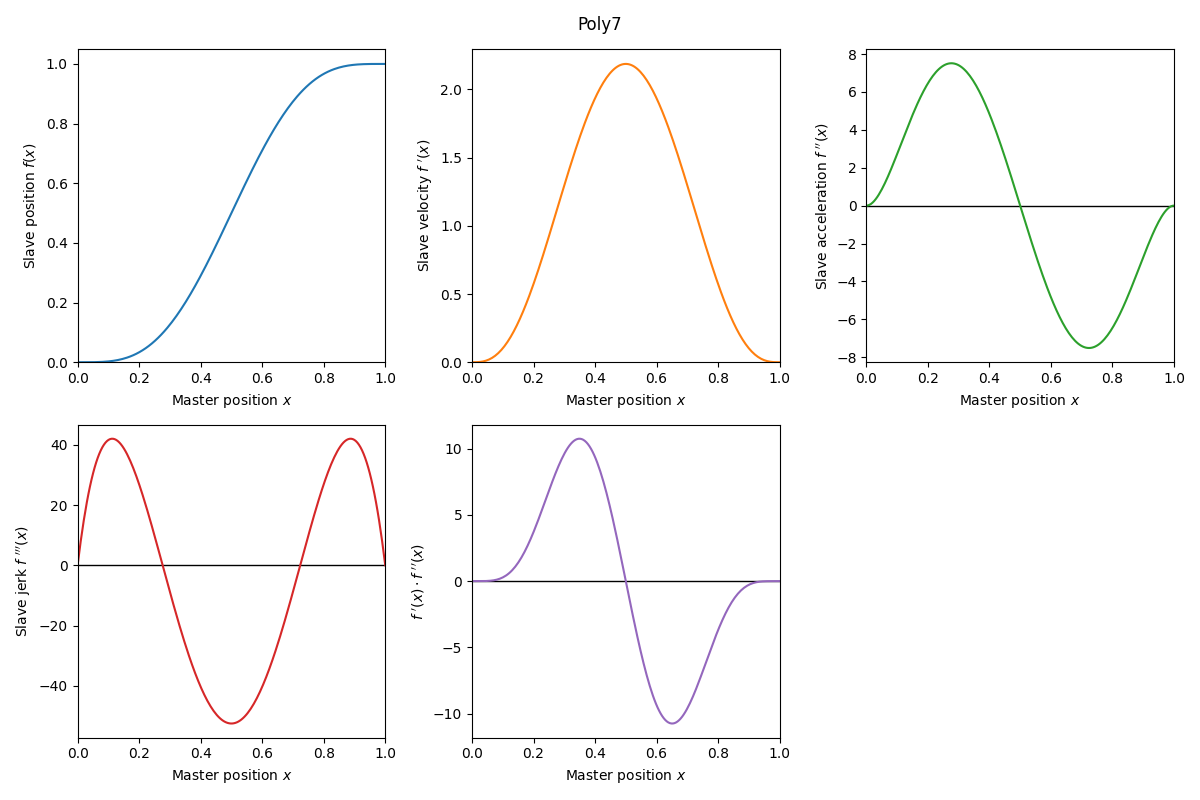 |
Poly5 | . Conditions aux limites
| 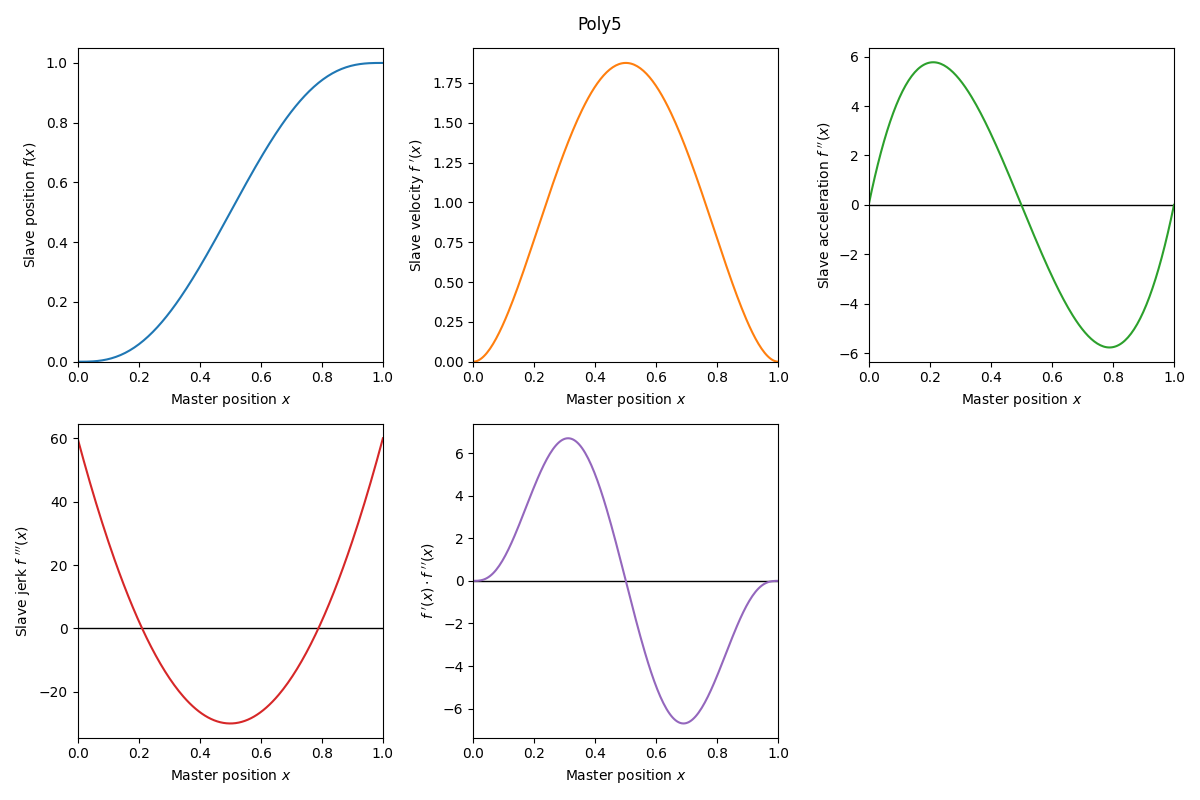 |
ModifiedSine | . Conditions aux limites
. Paramètres du segment
| 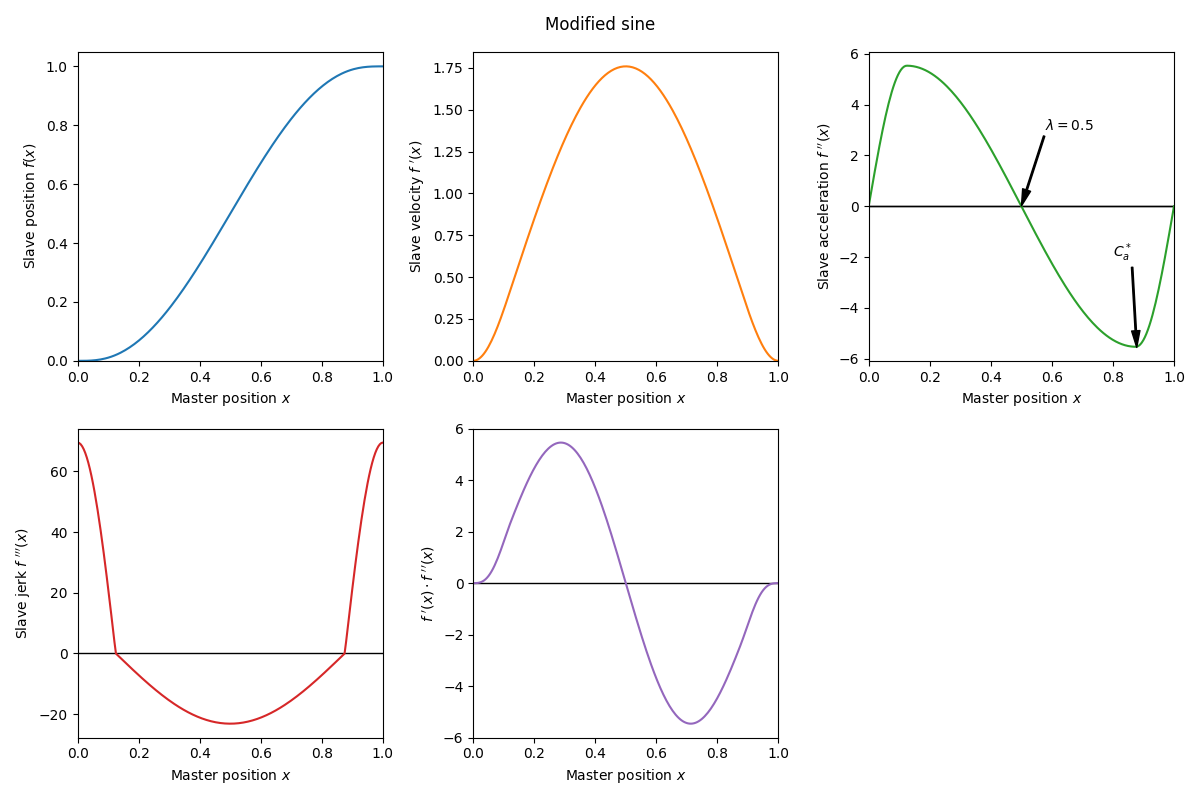 |
Line | . Conditions aux limites
| 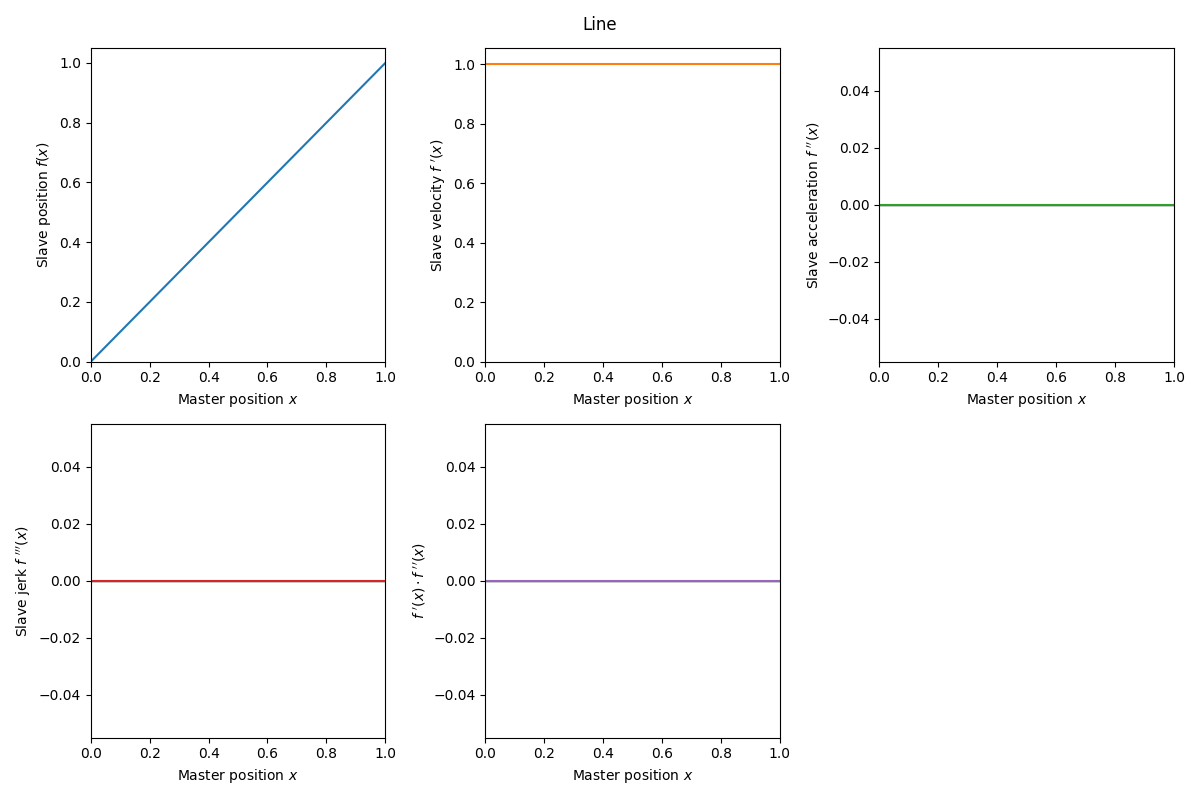 |
InclinedSine | . Conditions aux limites
| 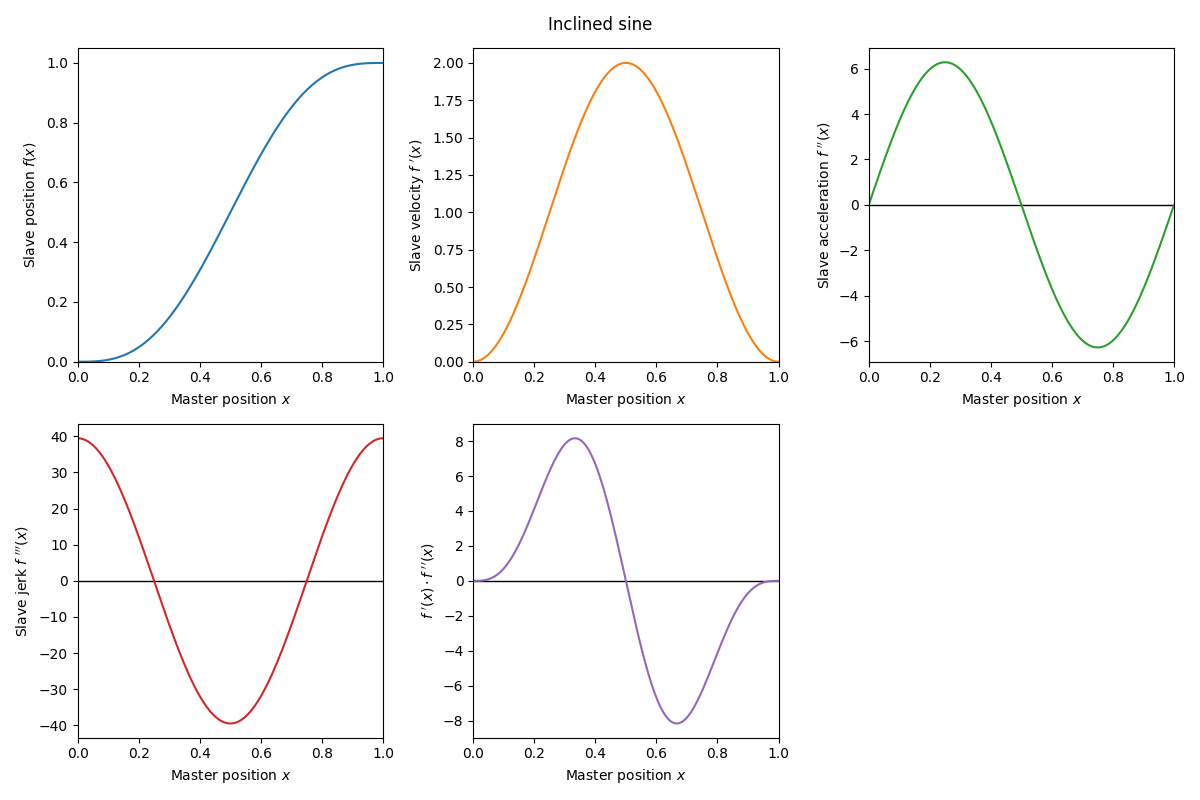 |
Le choix du type de segment dépend de l'application car chaque type possède des propriétés dynamiques spéciales. Il existe différents types de segments applicables en fonction de la tâche de déplacement (par exemple, maintien — vitesse constante).
Le tableau suivant fournit une vue d'ensemble :
Demeurer (v=0, a=0) | Vitesse constante (v≠0, a=0) | Inversion (v=0, a≠0) | Mouvement (v≠0, a≠0) | |
|---|---|---|---|---|
Demeurer (v=0, a=0) |
|
|
|
|
Vitesse constante (v≠0, a=0) |
|
|
|
|
Inversion (v=0, a≠0) |
|
|
|
|
Mouvement (v≠0, a≠0) |
|
|
|
|