Robot articulé 6 axes
Transformation d'un robot à bras articulé à six axes rotatifs et six degrés de liberté (DoF). Les trois axes d'orientation du bras du robot se croisent en un point : le centre de l'articulation.
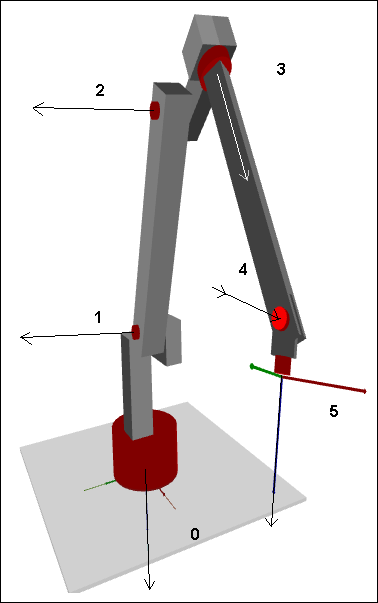
Les SMC_Trafo_ArticulatedRobot_6DOF et SMC_TrafoF_ArticulatedRobot_6DOF les blocs fonctionnels implémentent les transformations avant et inverse d'un robot à bras articulé avec six axes de rotation. Dans l'image, le système de coordonnées cartésiennes est marqué ci-dessous à l'axe 0. L'axe z pointe vers le bas et l'axe x pointe vers l'avant en direction du point central de l'outil (TCP). L'origine du système de coordonnées cartésiennes est l'axe d'intersection 0 et le dessous du robot.
Définition des axes
Les axes rotatifs sont identifiés par des flèches noires. Le sens de rotation positif est donné par la règle de la main droite. Par exemple, lorsque l'axe 0 est tourné dans le sens positif, le robot tourne dans le sens des aiguilles d'une montre vu de dessus.
Axes 0, 1, 3 et 4 : ]-180°, 180°[
Axe 2 : [-90°, 180°]
Axe 5 : Illimité ; la portée peut être supérieure à 360°.
Position de référencement et dimensions
L'image de gauche montre la position de référence de la cinématique, c'est-à-dire la position où tous les axes sont en position zéro. Spécifiez les dimensions indiquées dans la structure de configuration SMC_TrafoConfig_ArticulatedRobot_6DOF. Les noms et signes des paramètres sont conformes à la convention Denavit-Hartenberg. L'image de droite montre le paramètre supplémentaire Denavit-Hartenberg d3.
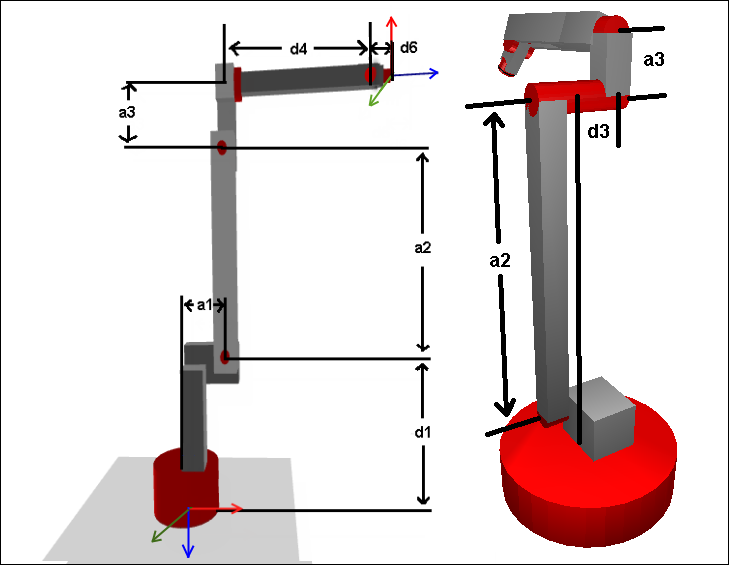
a1, a3, d4 et d6 doivent être >= 0
a2 doit être > 0 (>
g_fSMC_CNC_EPS)d1 doit être <= 0
Décalage de joint (sigma_i) | Décalage du levier (d_i) | Longueur du levier (a_i) | Rotation du levier (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d1 | a_1 | -90° |
2 | 90° | 0 | a_2 | 0° |
3 | 0° | d3 | a_3 | 90° |
4 | 0° | d4 | 0 | 90° |
5 | 0° | 0 | 0 | -90° |
6 | 0° | d6 | 0 | 0° |
La programmation
La position du centre de l'outil est contrôlée par X, Y et Z. Les unités de X, Y et Z sont les mêmes que celles utilisées pour les paramètres a_i et d_i (par exemple : mm). L'orientation est contrôlée en degrés avec A (lacet), B (tangage) et C (roulis).
Objets de transformation
La structure des données SMC_TrafoConfig_ArticulatedRobot_6DOF et le SMC_Trafo_ArticulatedRobot_6DOF et SMC_TrafoF_ArticulatedRobot_6DOF les blocs fonctionnels sont liés à SM3_CNC.