Cinématique du palettiseur 4 axes
La cinématique de palettisation à 4 axes est un type de robot général fréquemment utilisé pour les tâches de palettisation. La cinématique est dotée de quatre axes rotatifs commandés (marqués en rouge) et d'un cinquième axe rotatif mécanique (marqué en gris). le SMC_Trafo_4AxisPalettiseur et SMC_TrafoF_4AxisPalettiseur Les POU implémentent sa transformation directe et inverse.
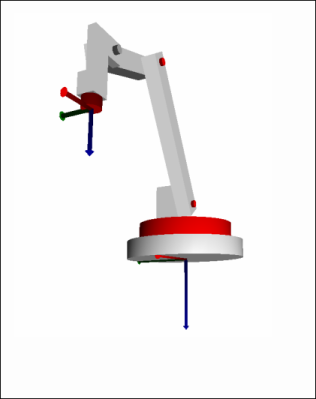
Le système de coordonnées cartésien est la base du palettiseur. L'axe Z pointe vers le bas perpendiculairement et l'axe X "vers l'avant", c'est-à-dire dans la direction où le bras pointe dans la direction zéro des axes. L'origine du système de coordonnées cartésiennes est l'intersection de l'axe de l'articulation 1 et du dessous du robot.
Définition des axes
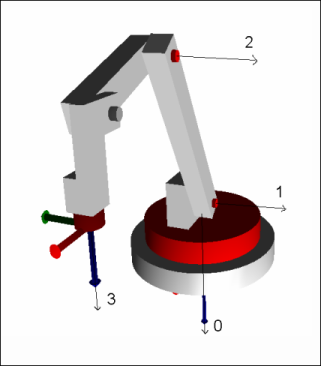
L'image suivante montre le sens de rotation des quatre axes. Les flèches noires suivent l'axe de l'articulation. Le sens de rotation est déterminé selon la règle de la main droite : Si le pouce de la main droite pointe vers le bas le long de la flèche, alors le sens de rotation positif est dans la direction du doigt légèrement incurvé. Par exemple, vu de dessus, le sens de rotation positif de l'axe 0 est le sens des aiguilles d'une montre, tandis que les axes 1 et 2 s'inclinent "vers l'avant" pour une rotation positive.
La cinématique est dotée de quatre axes de rotation contrôlés (voir les axes de couleur rouge a0, a1, a2, a3) et d'un cinquième axe de rotation mécanique (voir l'axe de couleur grise M).
Axe 0 : ]-180°, 180°[
Axe 1 : [-90°, 90°]
Axe 2 : [-180°, 90[
Axe M : axe rotatif mécanique. Aucune restriction
Axe 3 : Sans restriction ; la portée peut également être supérieure à 360°
Position zéro et dimensions
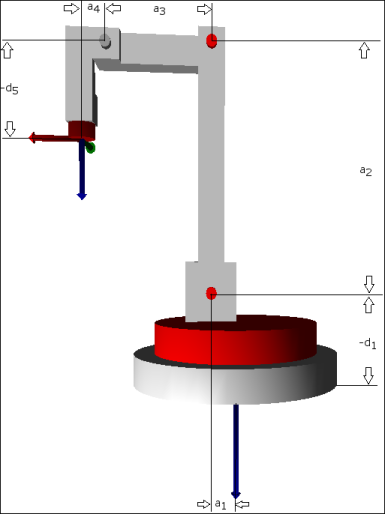
L'image montre la cinématique en position zéro de tous les axes. En position zéro, les axes du système de coordonnées de l'outil sont parallèles à ceux du système de coordonnées de la machine. Spécifiez les dimensions indiquées dans la structure de configuration SMC_TrafoConfig_4AxisPalletizer Précisez également tout a_i avec des signes positifs et tout d_i avec des signes négatifs. Les noms des paramètres sont conformes à la convention Denavit-Hartenberg.
Décalage de joint (sigma_i) | Distance articulaire (d_i) | Longueur de l'élément de bras (a_i) | Torsion (alpha_i) | |
|---|---|---|---|---|
1 | 0° | j_1 | un_1 | 90° |
2 | -90° | 0 | a_2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | j_5 | 0 | 180° |
Programmation en code G
La position du préhenseur est contrôlée avec X, Y et Z. La rotation du préhenseur sur la verticale est contrôlée par l'axe supplémentaire C. Les angles sont spécifiés en degrés.
Objets
La structure des données SMC_TrafoConfig_4AxisPalletizer et le SMC_Trafo_4AxisPalletizer et SMC_TrafoF_4AxisPalletizer les blocs fonctionnels sont liés à la bibliothèque SM3_Transformation. Pour une description des paramètres, recherchez ces objets dans le gestionnaire de bibliothèque.