Interruption et poursuite des mouvements
Le Robotics_Interrupt_Continue.project L'exemple de projet décrit ici se trouve dans le répertoire d'installation de CODESYS sous ..\CODESYS SoftMotion\Examples.
Cet exemple montre comment les mouvements commandés peuvent être interrompus avec le SMC_GroupInterrupt bloc fonctionnel et repris ultérieurement avec le SMC_GroupContinue bloc fonctionnel. Le groupe d'axes peut effectuer n'importe quel mouvement entre interruption et continuation.
Structure de la candidature
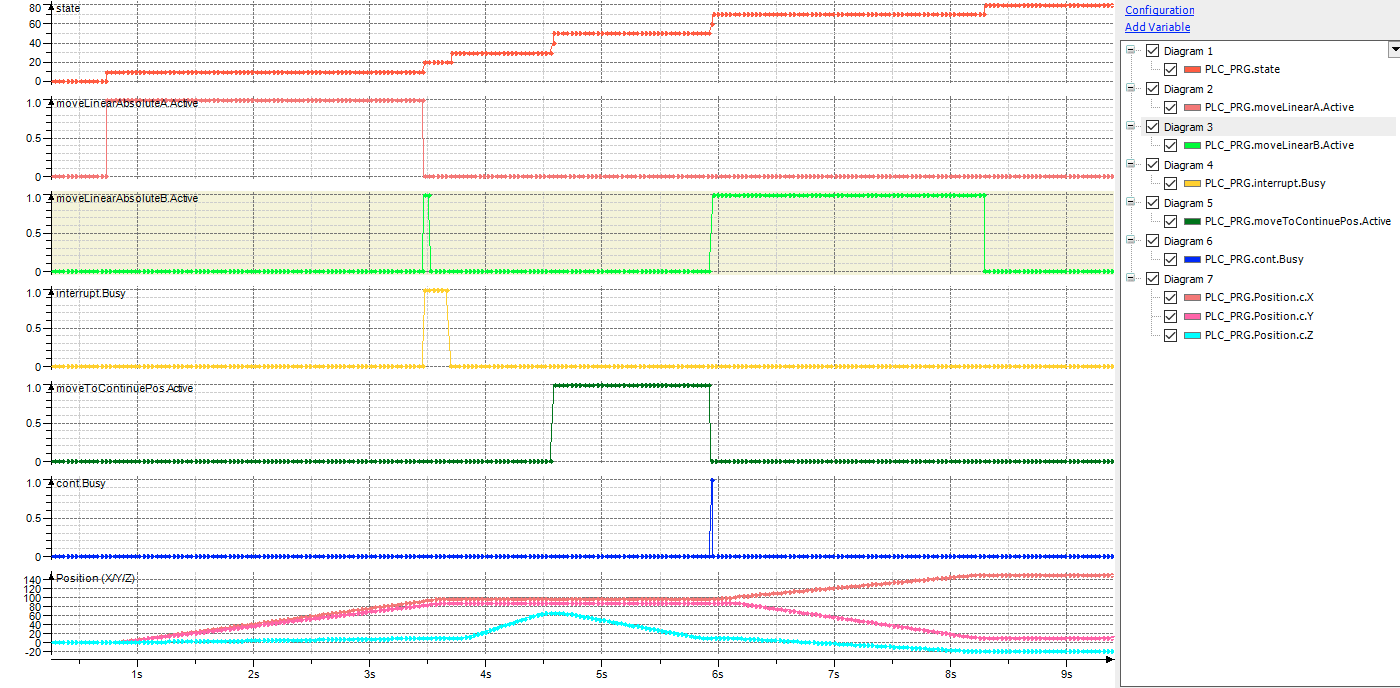
L'application consiste en une simple machine à états dans le PLC_PRG programme et une trace pour suivre facilement les transitions d’état.
Tout d'abord, les axes et le groupe d'axes sont activés. (
STATE_POWER_ON)Puis, deux mouvements,
moveLinearAetmoveLinearB, sont commandés avec le mélange. (STATE_START_MOVING)Dès que le deuxième mouvement est actif (lorsque le mixage commence), le mouvement est interrompu. La cause pourrait être, par exemple, qu'un défaut d'outil ait été détecté.
(STATE_INTERRUPT)Un mouvement PTP relatif est effectué dans la direction Z positive, par exemple pour remplacer l'outil après le défaut.
(STATE_INTERMEDIATE_MOVEMENT)Avant de reprendre, le système revient à la position où le mouvement initial a été interrompu. (
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)Le mouvement initial est repris.
(STATE_CONTINUE)
Usage
Compilez le programme créé et connectez-vous. Pour suivre les différents états, vous pouvez télécharger la trace sur le contrôleur. Démarrez l'application.