Conduite virtuelle
Les lecteurs virtuels sont des lecteurs simulés dans le logiciel. Avec cela, vous pouvez tester vos programmes sans matériel connecté ou implémenter des fonctionnalités étendues. Ces types de fonctions incluent, par exemple, le contrôle du dépassement du mouvement des axes et la méthode cartésienne manuelle d'un robot dans un espace.
Pour plus d'informations, consultez : Contrôle d'un entraînement à cames avec un axe de temps virtuel
Astuce
Les variateurs virtuels simulent un entraînement physique en utilisant les positions définies des cycles précédents pour calculer les valeurs réelles de position, de vitesse et d'accélération au début d'un cycle. Fonctions nécessitant un lecteur physique, telles qu'un MC_TouchProbe dans le lecteur ou à l'aide de SMC_SetControllerMode, ne sont pas pris en charge.
Ajout d'un lecteur virtuel
Condition : un contrôleur SoftMotion est inséré dans le projet.
Dans l'arborescence des appareils, sélectionnez SoftMotion Piscine de l'axe général.
Dans le menu contextuel, cliquez sur .
Dans le Ajouter un appareil boîte de dialogue, sélectionnez le appareil.
Clique le Ajouter un appareil bouton.
L'appareil est ajouté à l'arborescence des appareils.
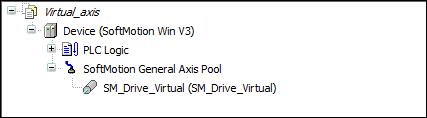
Un double-clic sur l'appareil ouvre l'éditeur d'appareil correspondant.