Unités d'entraînement couplées
Les entraînements couplés appartiennent à un appareil qui représente l'entraînement dans la topologie du bus de terrain. Les symboles de ces variateurs comportent une petite marque indiquant le type de bus de terrain correspondant. Par exemple, chaque servo variateur standard est connecté au contrôleur par un bus de terrain.
Lors de l'utilisation de lecteurs, CODESYS SoftMotion fournit des descriptions d'appareils spécifiques pour le maître de bus de terrain (suffixe "_SoftMotion"). Ceux-ci ont des paramètres de base optimisés pour l'entraînement.
Important
Pour les lecteurs utilisés avec CODESYS SoftMotion, la gestion modulo doit être désactivée dans le variateur. La gestion modulo est effectuée par CODESYS SoftMotion dans le contrôleur. Si possible, la plage de déplacement maximale doit être définie sur 32 bits.
Ajout d'un dispositif d'entraînement couplé (EtherCAT)
Condition : un contrôleur compatible SoftMotion est inséré dans le projet.
Sélectionnez le SoftMotion contrôleur dans l'arborescence des appareils.
Dans le menu contextuel, cliquez sur .
Dans le Ajouter un appareil boîte de dialogue, sélectionnez le appareil.
Clique le Ajouter un appareil bouton.
L'appareil est ajouté à l'arborescence des appareils. le Ajouter un appareil la boîte de dialogue reste ouverte.
Sélectionnez l'appareil que vous venez d'ajouter à l'arborescence des appareils.
Dans le Ajouter un appareil boîte de dialogue, sélectionnez un esclave SoftMotion ().
Clique le Ajouter un appareil bouton.
L'appareil est ajouté à l'arborescence des appareils.
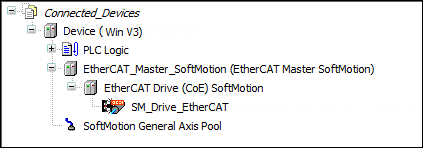
Un double-clic sur l'appareil ouvre l'éditeur d'appareil correspondant.