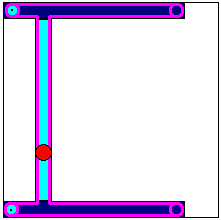
Portique en H avec axes stationnaires
La configuration cinématique est similaire au système de portique, mais les axes (entraînements) sont solidement montés. Ils déplacent le porte-outil au moyen d'une courroie.
Transformation au moyen de la SMC_TRAFO_GantryH2 et SMC_TRAFOF_GantryH2 Les POU nécessitent les configurations d'axe suivantes. D'autres configurations peuvent être réalisées en échangeant x et y :
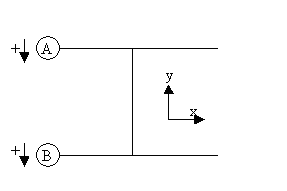
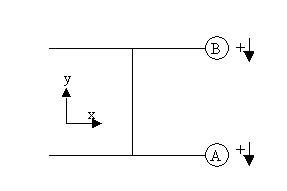
Cette transformation nécessite un référencement particulier : les deux axes doivent être déplacés à la même vitesse. Si le mouvement doit être dans la direction X, alors les entraînements A et B doivent être déplacés, alors qu'ils doivent se déplacer avec une vitesse inverse pour strictement un mouvement X. Pour un mouvement X uniquement, ils doivent être déplacés avec une vitesse opposée. Si la prise d'origine est trouvée, les valeurs X et Y calculées à partir de la POU de transformation directe sont utilisées comme décalage (dOffsetX et dOffsetY).