Onglet : Général
Type d'axe | |
Mode virtuel |
Remarque : Vous pouvez également définir et réinitialiser un mode virtuel d'un variateur en code CEI à l'aide de la |
Modulo |
Valeur modulo [u]: Valeur d'un cycle (période modulo) La valeur est enregistrée dans le Remarque : si vous sélectionnez le Modulo type de lecteur, puis le produit |
Fini |
Fins de course logiciels Activé
|
Type de moteur | |
Rotary |
|
Linéaire |
|
Type de rampe de vélocité Définit le profil de vitesse pour les modules monoaxes et maître/esclave générateurs de mouvements : Remarque : les types de rampes Pins² et Quadratique (lisse) ne sont pas pris en charge pour la robotique. | |
Trapèze |
|
Pins² |
|
Quadratique |
|
Quadratique (lisse) |
|
Identification | |
IDENTIFIANT | Identifiant entier. Doit être unique pour chaque lecteur. Par exemple, cet identifiant est utilisé dans le journal du PLC afin d'identifier le variateur en cas d'erreur. |
Temps mort | |
Cycles | Le temps mort par cycles entre |
Limites dynamiques Les valeurs limites des POU PLCopen Part 4 sont prises en compte. De plus, ils sont utilisés par les POU des bibliothèques sous le nom | |
Vélocité [u/s] | Valeur limite de la vitesse, de l'accélération, de la décélération et de la secousse |
Accélération [u/s²] | |
Décélération [u/s²] | |
Secousse [u/s³] | |


Limites logicielles | |
Activé |
|
Réaction à une erreur logicielle . Causes d'une erreur logicielle
Pour la réaction à une erreur logicielle, Décélération, le Max., et la décélération des limites dynamiques sont prises en compte. Une décélération est également calculée à partir de la distance maximale. La plus élevée de ces valeurs de décélération est utilisée pour la rampe d'erreur | |
Décélération [u/s²]: | Décélération de la rampe d'erreur |
Distance maximale [u] | Facultatif Le lecteur doit s'être arrêté à cette distance après qu'une erreur se soit produite. |
Surveillance du décalage de position Réponse du système à un décalage détecté. Un décalage est détecté lorsque la différence entre la position réglée et la position réelle compensée dépasse la limite de décalage. La position réelle extrapolée est calculée selon la formule suivante :
Cette valeur est la position réelle de l'axe compensée par le temps mort. Remarque : Si vous surveillez le décalage, vous devez déterminer et saisir le temps mort. Pour une description, reportez-vous au chapitre suivant : Valeurs réelles, valeurs définies et temps mort. Remarque : la surveillance du décalage n'est pas disponible pour les lecteurs virtuels. | |
Désactivé | Pas de réponse La surveillance du décalage est désactivée. |
Désactiver le lecteur | Le |
Effectuez un arrêt rapide | Le |
Restez activé | Le variateur reste allumé, mais tous les mouvements de course sont interrompus brusquement. |
Limite de décalage: | Surveillance du décalage dans le contrôleur Une surveillance indépendante peut également exister dans le lecteur, mais elle n'est pas configurée dans cette boîte de dialogue. |
Pour plus d'informations, consultez : Détermination du temps mort du système
Les images suivantes illustrent l'effet des différents types de rampes. La position est dessinée en vert, la vitesse en bleu et l'accélération en rouge.
trapèze La vitesse est partiellement linéaire et continue, tandis que l'accélération partiellement constante indique des sauts. | 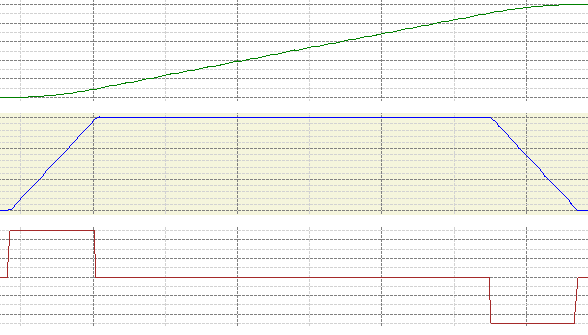 |
Sin² Les ruptures du profil de vitesse sont lissées (en utilisant la fonction sin² à la place des lignes) pour réduire les sauts d'accélération. L'utilisateur ne peut pas limiter l'à-coup pour ce type de rampe. L'à-coup maximum réglé n'a d'effet que si l'accélération n'est pas égale à zéro au début du mouvement et que la rampe de décélération et d'accélération interrompue ne peut pas être poursuivie sans interruption. Ensuite, en tenant compte de la limite d'à-coup, l'accélération est réduite à zéro avant le démarrage du mouvement en cours. Par rapport au profil de vitesse trapézoïdal, la décélération prend plus de temps dans ce cas. | 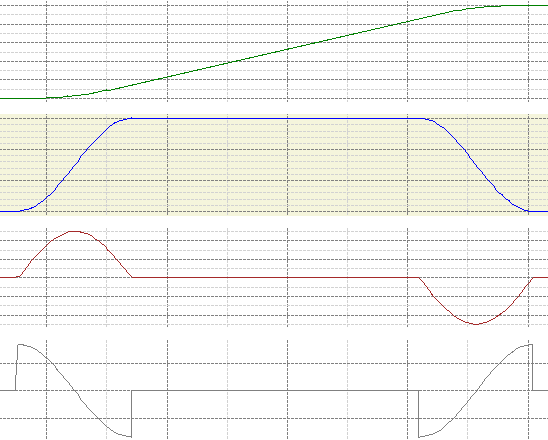 |
Quadratique L'accélération est partiellement linéaire et continue et la secousse a des sauts. La vitesse se compose de segments quadratiques et linéaires. | 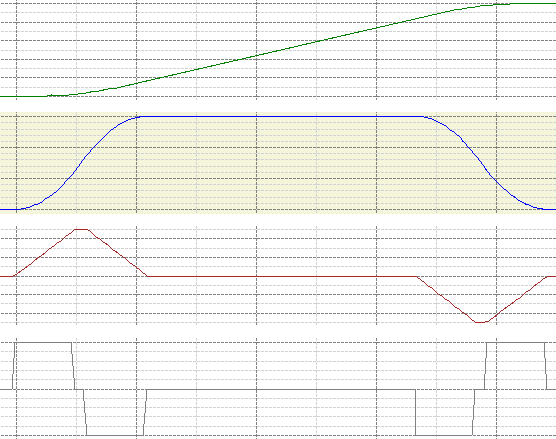 |
Quadratique (lisse) Les rampes d'accélération linéaires de type rampe quadratique sont remplacées par une fonction "lisse" avec une valeur de pente nulle en début et en fin. En conséquence, la secousse est également continue. Remarque : Si un mouvement est interrompu, des interruptions de l'à-coup peuvent se produire. | 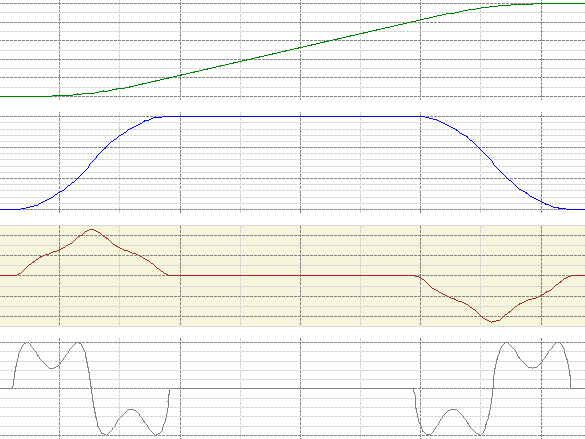 |
Pour plus d'informations, voir : Interruption des mouvements