Axes de spline supplémentaires A, B, C
mot de code G: A, B, C
Fonction: Utilisation A, B, et C pour définir les positions cibles pour les axes splines supplémentaires. Ces axes sont similaires à P, Q, U, V, et W. Alors que P, Q, U, et V sont interpolés linéairement, A, B, et C sont interpolés avec un polynôme du 3e degré.
Astuce
En utilisant
A,B, ouCexclut l'utilisation des axes supplémentairesU,V, etWparce queU,V, etWdéfinissez le dégradé.Les haches
A,B, ouCpeut être sélectionné avec les bits 3, 4 ou 5 auwAxisentrée deSMC_Limit DynamicsouwAddAxisdeSMC_Check for Limits.Le
SMC_SmoothPath,SMC_SmoothMerge,SMC_SmoothBSpline, etSMC_Reculez les pentes ABCdes blocs fonctionnels déterminent automatiquement la pente des axes supplémentaires. Cela signifie que la définition deU,V, ouWn'est pas nécessaire.
Code G
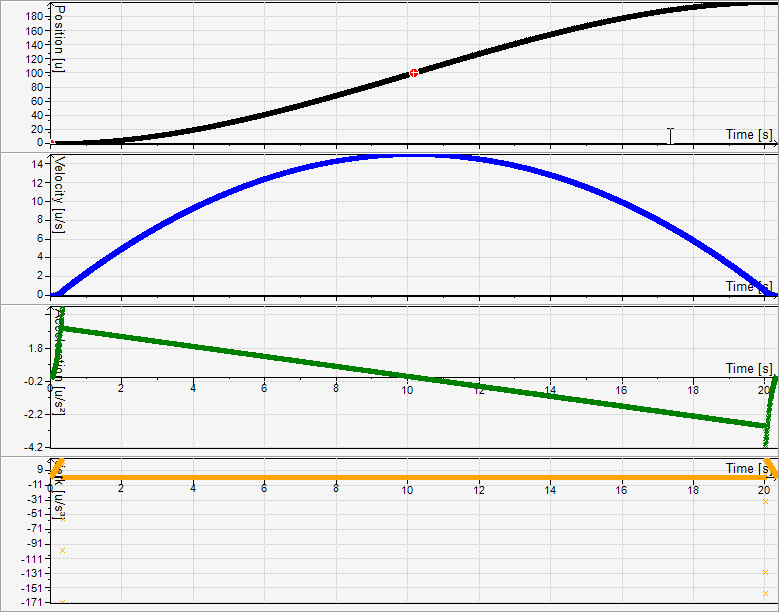
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
L'axe supplémentaire linéaire P est interpolé linéairement à la trajectoire parcourue. En conséquence, son profil temporel renvoie celui de la vitesse de trajectoire.
L'axe de spline supplémentaire A est interpolé en tant que fonction polynomiale.
L'utilisation de la fonction spline est nécessaire, en particulier si une trajectoire avec des transitions tangentes constantes est utilisée, que l'interpolateur n'a pas à décélérer à la vitesse 0 :
Code G
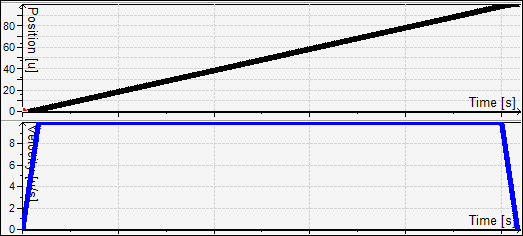
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
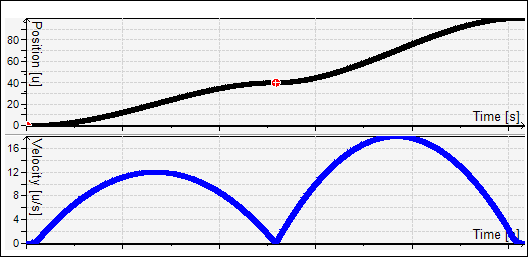
Dans le cas linéaire, vous constatez un saut de vitesse, car 40 unités de l'axe supplémentaire se déplacent sur 50 unités de trajectoire dans la première partie et 60 unités de l'axe supplémentaire se déplacent sur 50 unités de trajectoire dans la deuxième partie. Comme la vitesse de trajectoire ne définit (XYZ) qu'après l'espace cartésien de trajectoire, une vitesse constante en X provoque un saut de vitesse en P :
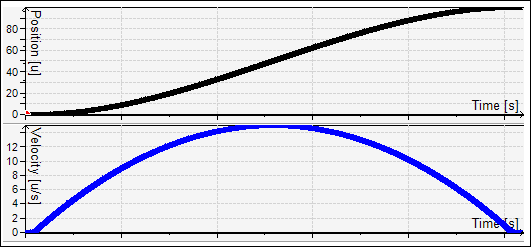
L'axe de la spline affiche le profil suivant :
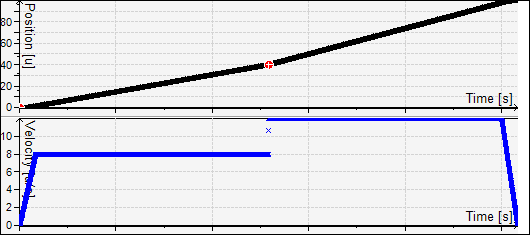
La pente des axes A, B et C à la position finale peut être définie par les mots U, V et W. L'unité de la pente est l'unité de trajectoire de l'axe supplémentaire par unité de trajectoire dans l'espace.
Code G
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U1.5 N30 G1 X200 A200 U0
La pente programmée par l'utilisateur (U=2) de l'axe A s'applique car ce programme contient une transition continue entre N20 et N30. Par conséquent, pour X=100, la position de l'axe A augmente deux fois plus vite que la longueur du trajet