Configurations cinématiques
Une configuration cinématique décrit la disposition des axes dans un groupe d'axes les uns par rapport aux autres. Selon la cinématique, plusieurs configurations sont possibles pour une même position TCP.
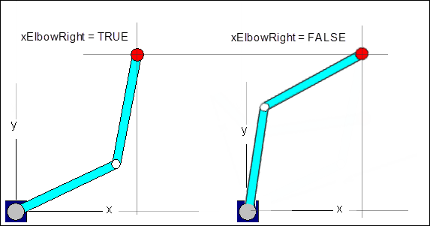
Par exemple, deux configurations possibles sont présentées pour SCARA 2.
Le groupe d'axes a une configuration active qui ne doit pas nécessairement correspondre aux positions d'axes actuelles. Si un mouvement est commandé, alors la position cible peut être convertie en coordonnées d'axe. La configuration active au moment de la commande est utilisée.
Cette configuration active peut être définie avec le bloc fonction SMC_SetKinConfiguration. Lors de l'initialisation et à chaque changement de cinématique, le groupe d'axes applique la configuration standard. Toute cinématique avec une configuration a une configuration standard.
Astuce
Un mouvement CP entre deux configurations n'est pas possible. Dans ce cas, le positionnement doit être effectué au moyen d'un mouvement PTP.
Astuce
La configuration actuelle peut être déterminée avec le bloc fonction MC_GroupReadActualPosition.
Réglage de la configuration pour une conception cinématique
Chaque conception cinématique avec une configuration possède son propre POU pour le calcul des données de configuration. Le nom de ce bloc fonction correspond au nom de la cinématique plus le suffixe _config. Le POU convertit les différentes configurations dans le type de données ConfigData. Ce type de données est transmis au bloc fonction SMC_SetKinConfiguration.
Appeler le bloc fonction
Kin_Scara2_Z_Configde la bibliothèqueSM3_Transformation. SaisirxElbowRight= VRAILe bloc fonctionnel fournit les données de configuration de type
ConfigData.Appeler le bloc fonction
SMC_SetKinConfigurationde la bibliothèqueSM3_Robotics. Ecrire l'entréeConfigDataavec les données de configuration préalablement déterminées.Définissez la configuration active du SCARA 2.
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);Manipulation de la cinématique couplée
Il existe une cinématique couplée lorsque la cinématique de position et la cinématique d'orientation sont utilisées simultanément. Cela se traduit par la configuration "couplée" des deux configurations en appelant Kin_Coupled_Config de la bibliothèque SM3_Transformation. La configuration de la cinématique de position et de la cinématique d'orientation est fournie au bloc fonction aux entrées.
Pour plus d'informations, consultez : Axes rotatifs avec plage de valeurs supérieure à 360°