Engrenages électroniques, décalage de phase et compensation du jeu des engrenages
Voir le BasicMotion_SynchronizedMotion.project exemple dans le répertoire d'installation de CODESYS sous ..\CODESYS SoftMotion\Examples.
Cet exemple montre comment utiliser une boîte de vitesses électronique en combinaison avec un déphasage et une compensation de jeu d'engrenage.
Structure de la candidature
L'application consiste en une simple machine à états dans le PLC_PRG programme et une trace que vous pouvez utiliser pour suivre facilement la fonctionnalité des blocs fonctionnels.
Activer les axes avec
MC_Power.(STATE_POWER)Démarrez les mouvements synchrones et déplacez l'axe maître en continu entre la position 0 et la position 100 (
STATE_COMMAND_POS_0etSTATE_COMMAND_POS_1).
Usage
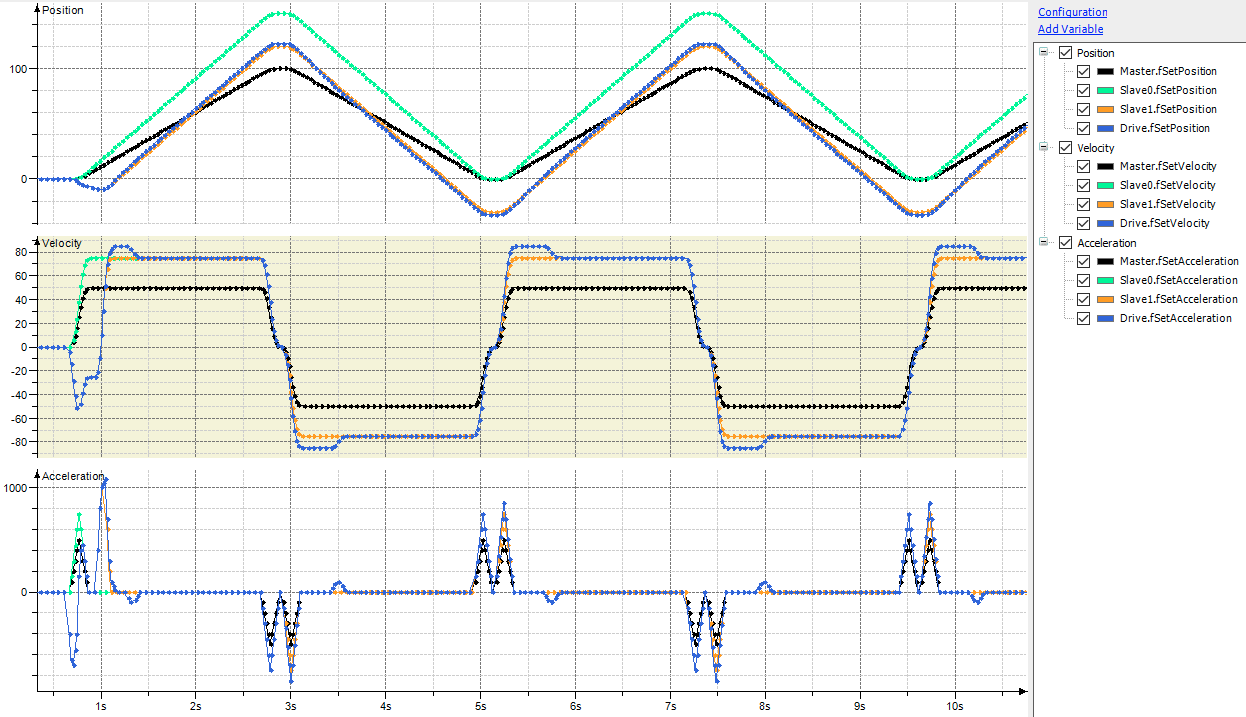
L'axe maître (noir dans le diagramme de trace) se déplace continuellement d'avant en arrière entre la position 0 et la position 100 à une vitesse maximale de 50 unités par seconde.
Une boîte de vitesses électronique (MC_GearIn) avec un rapport de transmission de 2:3 convertit le mouvement maître en Slave0 axe (vert dans le diagramme de trace). La vitesse maximale résultant des engrenages est de 75 unités par seconde.
Ensuite, un déphasage (MC_Phasing) de 30 unités est appliqué au Slave1 axe (orange dans le diagramme de trace). La vitesse est identique à la Slave0 axe, à l’exception de la phase de rampe.
Enfin, la compensation du jeu des engrenages est utilisée pour amener le mouvement au Drive axe (bleu dans le diagramme de trace). Une valeur irréaliste de 5 unités est fixée pour le jeu des engrenages à des fins de démonstration. Le schéma montre un mouvement compensateur au début du mouvement et à chaque inversion du sens du mouvement.