Composants de CODESYS SoftMotion
CODESYS SoftMotion est un progiciel utilisé comme environnement de développement et d'exécution pour le contrôle de mouvement. Il est décrit comme suit :
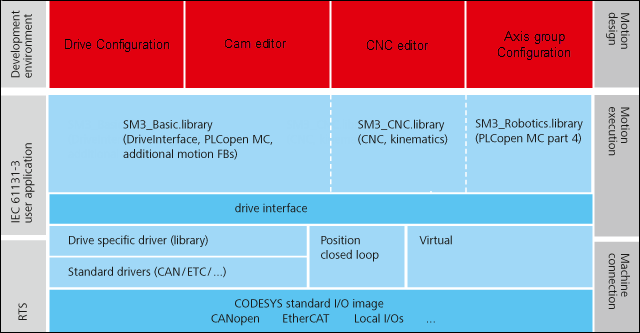
Configuration du lecteur: La configuration du variateur fournit un éditeur qui vous permet de définir la structure et la configuration du matériel du variateur à l'aide des CODESYS interface utilisateur. A ce stade, une instance d'un bloc fonctionnel CEI est créée pour représenter le variateur. Ce bloc fonctionnel communique automatiquement avec les variateurs sans effort supplémentaire de la part du programmeur CEI. Il est responsable de la transmission des données mises à jour.
Pour piloter les variateurs, le programme CEI peut adresser un variateur au moyen des blocs fonction du SoftMotion bibliothèques. Alternativement, vous pouvez également développer vos propres blocs fonctionnels à cette fin. Les valeurs de consigne (pour la position, la vitesse, l'accélération, etc.) sont écrites cycliquement par ces blocs fonction.
Noter la CODESYS SoftMotion Light produit fait partie de l'installation standard de CODESYS. Il permet de commander les axes. De cette façon, CODESYS définit uniquement la position cible uniquement et attend la réponse du contrôleur d'axe. Le contrôleur d'axe est responsable de la planification du mouvement. Un mouvement coordonné de plusieurs axes par CODESYS n'est pas possible.
Éditeur de cames: Dans l'éditeur de cames, vous pouvez décrire une came graphiquement ou au moyen de tableaux. CODESYS génère à partir de là une instance globale d'une structure de données qui décrit la came. Celui-ci est transmis à l'application où les POU applicables peuvent y accéder.
Editeur CNC: Dans l'éditeur CNC, vous pouvez générer des mouvements multidimensionnels. Vous pouvez créer la trajectoire CNC avec un éditeur de texte (selon DIN 66025) ou avec un éditeur graphique. Comme alternative à l'éditeur de texte, vous pouvez également travailler dans une vue tabulaire simplifiée.
Configuration du groupe d'axes: Un groupe d'axes définit les relations entre plusieurs axes mécaniquement dépendants qui positionnent et orientent collectivement un outil ou une plaque d'outil dans l'espace. Avec le configurateur, vous sélectionnez et configurez la cinématique à utiliser. De plus, vous pouvez affecter les axes SoftMotion.
le
SM3_Basicla bibliothèque est une bibliothèque de base pour tous SoftMotion applications. Plus précisément, il contient les éléments suivants :Blocs fonction PLCopen selon la norme PLCopen
Ces blocs fonction permettent de piloter des mouvements monoaxes ou des mouvements maître/esclave de deux axes (came électrique, entraînements électriques).
FB supplémentaires non couverts par les fonctionnalités PLCopen
Fonctions d'aide : par exemple pour la gestion des fichiers ou pour les messages d'erreur
le
SM3_CNCbibliothèque est basée surSM3_Basicbibliothèque. En plus des blocs fonctionnels pour les transformations cinématiques, il fournit tous les POU nécessaires pour générer, exécuter et afficher le mouvement CNC. Il fournit également des blocs fonctionnels pour le prétraitement et la reconstruction de chemin.le
SM3_Roboticscontient des blocs fonctionnels selon PLCopen Part 4 pour la robotique et des blocs fonctionnels supplémentaires. Le inclusSM3_Transformationsbibliothèque contient les transformations cinématiques prises en charge.le Interface d'entraînement fait partie de la
SM3_Basicbibliothèque et est responsable de la communication entre le programme CEI et les variateurs. Pour les lecteurs pris en charge, CODESYS SoftMotion fournit des bibliothèques qui implémentent cette interface de lecteur.
Astuce
Voir également les descriptions des exemples d'application.