Kin_TGantry2 (FB)¶
- FUNCTION_BLOCK Kin_TGantry2 IMPLEMENTS ISMPositionKinematics_Offset,
ISMPositionKinematicsInternal, ISMKinematicWithInfo2
Transformationsbaustein für ein 2-Achs-T-Portal
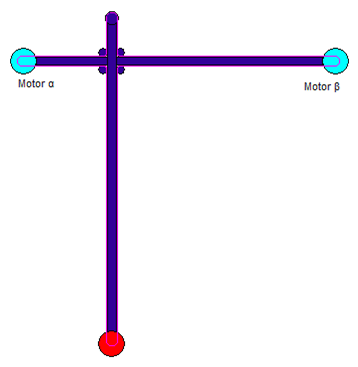
Die kinematische Konfiguration ist ähnlich, wie es bei Kin_HGantry2 beschrieben ist. Die Antriebe sind stationär montiert, sie bewegen die in Y-Richtung verlaufende Schiene und den Schlitten mit Hilfe eines umlaufenden Riemens (siehe Bild; Riemen in Pink).
Maschinenkoordinatensystem (MCS) |
|
|---|---|
Ursprung |
Die Position des TCP, wenn die Positionswerte beider Achsen 0 sind. |
X |
Die X-Achse ist so definiert, dass positive Geschwindigkeiten gleichen Betrags auf beiden Achsen zu einer Bewegung rein entlang der X-Achse in positiver Richtung führen. |
Y |
Die Y-Achse ist so definiert, dass eine negative Geschwindigkeit auf der ersten Achse (a0) zusammen mit einer positiven Geschwindigkeit gleichen Betrags auf der zweiten Achse (a1) zu einer Bewegung rein entlang der Y-Achse in positiver Richtung führt. |
Die Lage des Werkzeugkoordinatensystems (TCS) relativ zum MCS in der Nullposition:
Werkzeugkoordinatensystem (TCS) |
|
|---|---|
Ursprung |
Relativ zum MCS: dX = 0 dY = 0 dZ = 0 |
X |
Entlang der X-Achse des MCS in positiver Richtung |
Y |
Entlang der Y-Achse des MCS in positiver Richtung |
Z |
Entlang der Z-Achse des MCS in positiver Richtung |
Die Transformation ist adäquat für die folgende Achsenkonfiguration (andere Konfigurationen können durch Vertauschen von A und B erreicht werden):
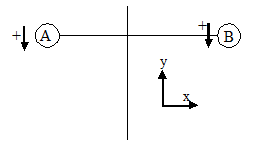
Die Werte der einzelnen Achsen haben folgende Bedeutung:
a0 |
Position der 1.Achse der Kinematik (A) |
a1 |
Position der 2.Achse der Kinematik (B) |
- Attribute:
sm_kin_libdoc
Properties:
Methods:
Structure: