「Kin_Polar」(FB)¶
- FUNCTION_BLOCK Kin_Polar IMPLEMENTS ISMPositionKinematicsInternal,
極キネマティクス の変換 FB です。
極座標系は 1 距離と 1 方向軸で構成されます。
マシン座標系 (MCS) |
|
|---|---|
オリジン |
直線軸 (a1) の位置の値が 0 である時の TCP の場所です。 |
X |
回転軸 (a0) が 0° である一方で直線軸 (a1) の正の速度が、純粋に X 軸に沿って正の方向への動作をもたらすように、X 軸は定義されます。 |
Y |
回転軸 (a0) が 90° である一方で直線軸 (a1) の正の速度が、純粋に Y 軸に沿って正の方向への動作をもたらすように、Y 軸は定義されます。 |
The location of the tool coordinate system (TCS) relative to the MCS in zero position:
Tool coordinate system (TCS) |
|
|---|---|
オリジン |
Relative to MCS: dX = 0 dY = 0 dZ = 0 |
X |
Along the X-Axis of the MCS in positive direction |
Y |
Along the Y-Axis of the MCS in positive direction |
Z |
Along the Z-Axis of the MCS in positive direction |
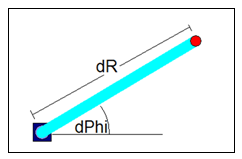
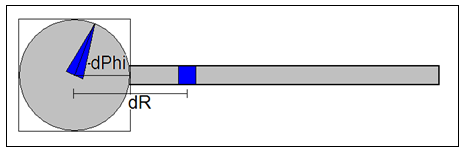
単一の軸の値には以下の解釈があります。
a0 |
回転軸の位置を、Z 軸を中心として度単位で表したもの。「軸へのマッピング」セクションでは「C」と呼んでいます。 |
a1 |
X 軸方向 (>= 0) での直線軸の位置。「軸へのマッピング」セクションでは「R」と呼んでいます。 |
注釈
このポジション キネマティクスは、CP 動作の方向モード「Axis」(軸) をサポートしません。
このキネマティクスが方向キネマティクスなしで使用される場合、Z 方向以外の方向への位置オフセットを持つツールとの互換性はありません (SMC_GroupSetTool 参照)。
- 属性:
sm_kin_libdoc
Properties:
Methods:
Structure: