Kin_Wrist2 (FB)¶
- FUNCTION_BLOCK Kin_Wrist2 IMPLEMENTS ISMToolKinematics2,
ISMOrientationKinematics3, ISMKinematicWithInfo2, ISMKinematicWithConfigurations, ISMOrientationKinematicsWithOriImage2
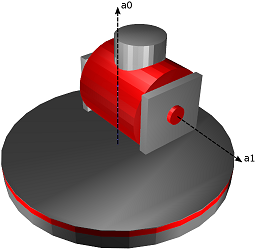
Bloc fonctionnel de transformation pour un poignet 2 axes en ligne, a0 tournant autour de l’axe Z et a1 autour du nouvel axe Y.
Les différentes valeurs d’axe sont interprétées comme suit :
a0 |
Angle [deg] de l’axe de lacet (azimut, A) |
a1 |
Angle [deg] de l’axe de roulis (inclinaison, B) |
Si la cinématique est fixée à une bride d’orientation constante, l’axe de roulis a1 peut avoir un décalage par rapport au système de coordonnées de base tourné de a0.
- Attributs :
sm_kin_libdoc- InOut :
Domaine de validité
Nom
Type
Commentaire
Entrée
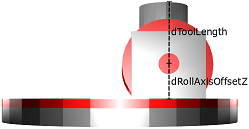
dToolLengthLREALDécalage du centre de rotation de l’axe de roulis a1 dans le sens radial par rapport à la bride de la cinématique. Mesure le long de l’axe Z du système de coordonnées de bride.
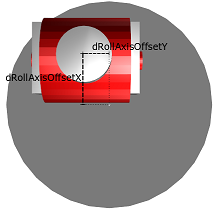
dRollAxisOffsetXLREALDécalage de l’axe de roulis a1 dans la direction X par rapport à l’origine du système de coordonnées de base tourné de a0.
dRollAxisOffsetYLREALDécalage de l’axe de roulis a1 dans la direction Y par rapport à l’origine du système de coordonnées de base tourné de a0.
dRollAxisOffsetZLREALDécalage de l’axe de roulis a1 dans la direction Z par rapport à l’origine du système de coordonnées de base tourné de a0.
Properties:
Methods:
Structure:
- AxesToCartesian (Method)
- CartesianToAxes (Method)
- GetAxisProperties (Method)
- GetConfigurationDataSize (Method)
- GetDefaultConfigurationData (Method)
- GetKinematicsName (Method)
- GetOrientationImageTotal (Method)
- GetOrientationImageWithOri (Method)
- GetPositionFromOrientation (Method)
- GetPositionFromOrientation2 (Method)
- GetPositionFromOrientation3 (Method)
- IsCompatibleWithPosKin (Method)
- IsSingularity (Method)
- NumAxes (Property)