Kin_Wrist2 (FB)¶
- FUNCTION_BLOCK Kin_Wrist2 IMPLEMENTS ISMToolKinematics2,
ISMOrientationKinematics3, ISMKinematicWithInfo2, ISMKinematicWithConfigurations, ISMOrientationKinematicsWithOriImage2
Transformation FB for a 2-axis inline wrist, where a0 rotates around the Z axis and a1 around the new Y axis.
The single axes values have the following interpretation:
a0 |
angle [deg] of the yaw axis (azimuth, A) |
a1 |
angle [deg] of the roll axis (inclination, B) |
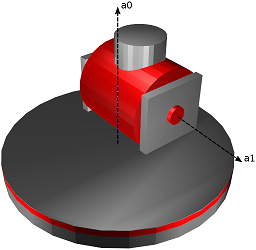
If the kinematics is attached to a flange with constant orientation, the roll axis a1 can have an offset relative to the base coordinate system rotated by a0.

- Attributes:
sm_kin_libdoc- InOut:
Scope
Name
Type
Comment
Input
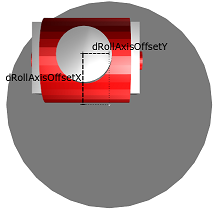
dToolLengthLREALOffset from center of rotation of the roll axis a1 in radial direction to the flange of the kinematics. Measured along the Z-axis of the flange coordinate system.
dRollAxisOffsetXLREALOffset of the roll axis a1 in X direction from the origin of the base coordinate system rotated by a0.
dRollAxisOffsetYLREALOffset of the roll axis a1 in Y direction from the origin of the base coordinate system rotated by a0.
dRollAxisOffsetZLREALOffset of the roll axis a1 in Z direction from the origin of the base coordinate system rotated by a0.
Properties:
Methods:
Structure:
- AxesToCartesian (Method)
- CartesianToAxes (Method)
- GetAxisProperties (Method)
- GetConfigurationDataSize (Method)
- GetDefaultConfigurationData (Method)
- GetKinematicsName (Method)
- GetOrientationImageTotal (Method)
- GetOrientationImageWithOri (Method)
- GetPositionFromOrientation (Method)
- GetPositionFromOrientation2 (Method)
- GetPositionFromOrientation3 (Method)
- IsCompatibleWithPosKin (Method)
- IsSingularity (Method)
- NumAxes (Property)