MC_Stop_SML (FB)¶
FUNCTION_BLOCK MC_Stop_SML
Executes a (blocking) stop on the axis.
As long as the Execute input is set or the stop is not finished, no other motion
command is possible on the axis, and the axis state is Stopping. After
both the stop is finished and Execute is reset, the axis status is set to
Standstill.
Note
the deceleration ramp can be set using parameter 2090 (fQuickStopDeceleration).
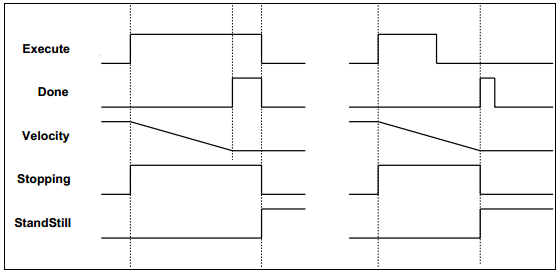
This diagram illustrates the behavior of MC_Stop_SML:
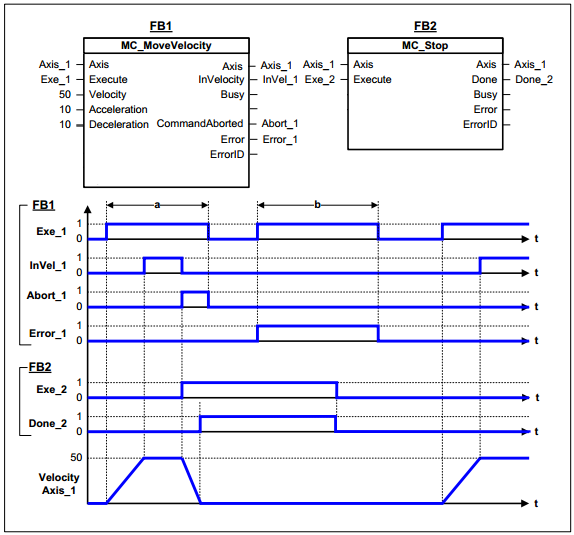
The example below shows the behavior in combination with MC_MoveVelocity_SML.
A rotating axis is ramped down with FB
MC_Stop_SML.The axis rejects motion commands as long as MC_Stop_SML parameter
Execute=TRUE. MC_MoveVelocity_SML reports an error indicating the busyMC_Stop_SMLcommand.
- InOut:
Scope
Name
Type
Comment
Inout
AxisReference to the axis
Input
ExecuteBOOLRising edge: The stop is started
Output
DoneBOOLZero velocity reached
BusyBOOLThe FB is not finished and new output values are to be expected
ErrorBOOLAn error has occured
ErrorIDError number