MC_MoveAbsolute_SML (FB)¶
FUNCTION_BLOCK FINAL MC_MoveAbsolute_SML
Commands a controlled motion to a specified absolute position.
Note
The motion completes with velocity zero.
For modulo axes, it is drive dependent which modulo period is selected for the final position.
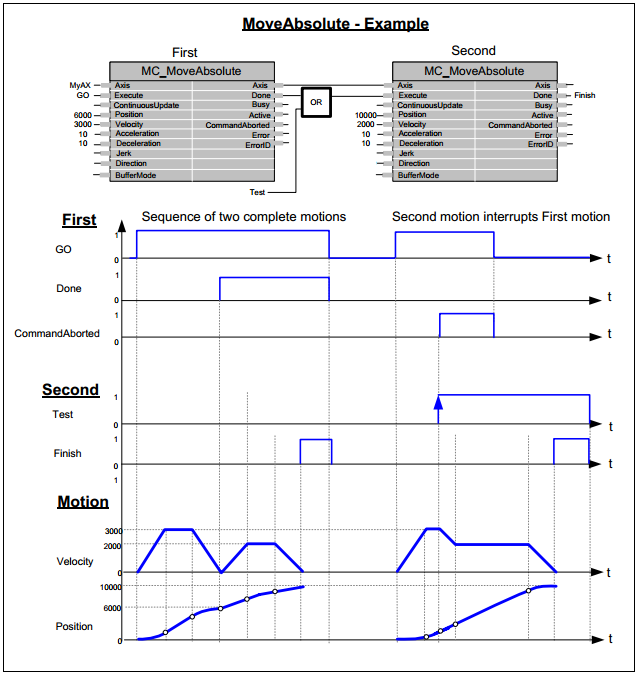
The following figure shows two examples of the combination of two instances
of MC_MoveAbsolute_SML:
The left part of the timing diagram illustrates the case if the second FB is called after the first one. If the first reaches the commanded position of 6000 (and the velocity is 0), then the output
Donecauses the second FB to move to position 10000.The right part of the timing diagram illustrates the case if the second FB starts the execution while the first FB is still executing. In this case the first motion is interrupted and aborted by the
Testsignal during the constant velocity phase of the first FB. The second FB moves directly to position 10000, although the position of 6000 is not reached yet.
- InOut:
Scope
Name
Type
Comment
Inout
AxisReference to the axis
Input
ExecuteBOOLRising edge: The motion is started
PositionLREALCommanded position for the motion (may be negative) (in technical units [u])
VelocityLREALValue of the maximum velocity (always positive) (not necessarily reached) [u/s]
AccelerationLREALValue of the acceleration (always positive) (increasing energy of the motor) [u/s²]
DecelerationLREALValue of the deceleration (always positive) (decreasing energy of the motor) [u/s²]
Output
DoneBOOLCommanded position reached
BusyBOOLThe motion is not finished and new output values are to be expected
CommandAbortedBOOLThe motion was interrupted by a motion command acting on the same axis
ErrorBOOLSignals that an error has occured
ErrorIDError number