一般的な
重要
このインターフェースでは、他のフィールドバスや追加のネットワークトラフィックを操作することはできません。EtherCATには専用のネットワークカードを使用してください。そうしないとリアルタイム機能が保証されません
の構成EtherCATモジュールは、使用されるマスターデバイスとスレーブデバイスのデバイス記述ファイルに基づいており、プロジェクトの設定ダイアログで調整できます。可能な限りシンプルでエラーのない使用を実現するために、標準的なアプリケーションでは、自動構成マスターのほとんどの構成設定が自動的に行われるようにします。
要件
使用時にはNpcapドライバが必要ですEtherCATデバイスCODESYS Control Win Npcapソフトウェアは、例えばWiresharkのセットアップに含まれています。ドライバーをインストールした後、またはUSBネットワークアダプターを挿入した後は、アダプターを選択できるようにWindowsを再起動する必要があります。
重要
このメモは、CODESYS SP18 までのバージョン。
WinPCap ソフトウェアをインストールします。
デフォルトでは、Wireshark のインストール時に Npcap もインストールされます。システムに Npcap をインストールしてはならないため、Wireshark のセットアップでこのオプションを無効にする必要があります。
使用する場合CODESYS Control RTE、WinPCap、Npcapは必要ありません。Windowsデバイスマネージャーのデフォルトのネットワークドライバーを特別なものに置き換える必要があります。CODESYSドライバ。
詳細については、CODESYS Control RTEランタイムシステム利用可能な動的コンポーネントまたはドライバー。
また、ファイル内のそれぞれのランタイムコンポーネントを有効にする必要があります。CODESYSControl_User.cfg。
Component.<subsequent number> = CmpEt100DrvIntel Pro 100で利用可能
Component.<subsequent number> = CmpEt1000DrvIntel Pro 1000で利用可能
Component.<subsequent number> = CmpRTL81x9MpdRTL8139で利用可能
Component.<subsequent number> = CmpRTL8169MpdRealtek RTL8169 または RTL8168 (PCIe バージョン) で利用可能
ヒント
ランタイムコンポーネントは、CODESYS Control RTE。
詳細については、以下を参照してください。CODESYS Control RTE V3
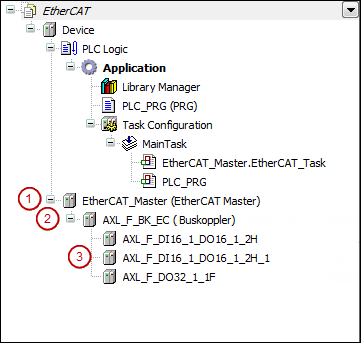
EtherCATデバイスツリー



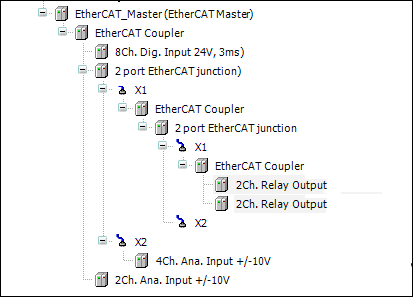
EtherCATトポロジー
ラインとツリーのトポロジーに加えて、CODESYSまた、EtherCATスタートポロジー。特別なEtherCATブランチ(2ポートEtherCATジャンクション(この例ではジャンクション)は、EtherCATスタートポロジー。モジュラーEtherCAT複数のブランチを使用することでスターを作成できます。その結果、個々のデバイスまたは完全なEtherCAT線は枝と接続することができます。EtherCATブランチは シンボル。
シンボル。
オプションデバイス
そのオプションデバイスこの機能は、さまざまなハードウェア構成に使用できます。スタックの開始時に、システムはオプションのデバイスが利用可能かどうかを確認します。デバイスが見つからない場合、自動的に非アクティブ化されます。ただし、例えばネットワーク回線の終端にあるデバイスであれば、後日デバイスをアクティブ化することもできます。一方、スレーブを自動起動オプションを選択すると、アクティブ化されたデバイスは自動的に「動作可能」に切り替わり、プロセス データがアクティブ化されます。
ヒント
バス サイクル タスクは、PLC の一般設定で設定されます。
アクセスEtherCATアプリケーションによる構成は、EtherCATマスターとEtherCATスレーブ。EtherCATマスターまたはEtherCATスレーブはオブジェクトとしてプロジェクトに挿入され、マスターとスレーブのインスタンスが自動的に作成されます。これらのインスタンスはアプリケーションプログラムで操作できます。例えば、マスターとスレーブの再起動、停止、ステータスチェックなどです。EtherCATデバイスの操作はアプリケーションから実行できます。
図書館IODrvEtherCATバス動作中でも個々のパラメータを読み書きするための機能ブロックを提供します。
