タブ:EtherCATマスター– ジェネラル
このタブは、EtherCATマスター。基本設定はデバイス記述ファイルから事前に設定されます。
構成パラメータの設定
重要
自動設定モード(自動構成 マスター/スレーブ自動設定モード(オプション)はデフォルトで選択されており、標準的なアプリケーションには十分です。このモードが選択されていない場合は、マスターとスレーブのすべての設定を手動で行う必要があります。これには専門知識が必要です。スレーブ間の通信を設定するには、自動設定モードオプションをオフにする必要があります。
自動構成 マスター/スレーブ |
マスターのこのオプションを選択した場合でも、個々のスレーブごとにエキスパート モードを明示的に有効にすることができ、これにより、自動的に生成されたプロセス データ構成を手動で編集できます。 |

ターゲットアドレス(MAC) | デバイスのMACアドレスEtherCAT電報を受信するネットワーク。 . オプション
|
ソース アドレス (MAC) | コントローラ(ターゲットシステム)のMACアドレスまたはネットワーク名(アダプタまたはPLC(ターゲットシステム)の名前) |
ネットワーク名 | 選択したオプションに応じて、ネットワークの名前または MAC が表示されます。 |
MAC でネットワークを選択 |
|
名前でネットワークを選択 |
|
スキャン | ネットワークをスキャンして、現在利用可能なターゲット デバイスの MAC ID または名前を検索します。 |
これらの設定は、冗長性オプションが選択されます。ここでは、追加デバイスのパラメータが説明に従って定義されます。 EtherCAT NIC 設定。 |
サイクル時間 (µs) | 新しいデータテレグラムがバス上に送信されるまでの時間間隔。分散クロックスレーブでこの機能を有効にすると、ここで指定されたマスターサイクル時間がスレーブクロックに転送されます。その結果、データ交換の正確な同期が実現されます。これは、空間的に分散されたプロセスで同時動作が必要な場合に特に重要です。同時動作の例としては、複数の軸が同時に協調動作を実行する必要があるアプリケーションが挙げられます。これにより、1マイクロ秒を大幅に下回るジッターで、ネットワーク全体にわたって非常に正確なタイムベースを実現できます。 |
同期オフセット | DCタイムベース間の遅延時間を設定するパラメータEtherCATスレーブとPLCのサイクル開始のタイミングです。デフォルト値は20%です。この時間は、 DC制御のスレーブすべてで同時に有効になります。20%のオフセットは、EtherCATスレーブは次の IEC サイクルの 20% 前に行われます。 これは、
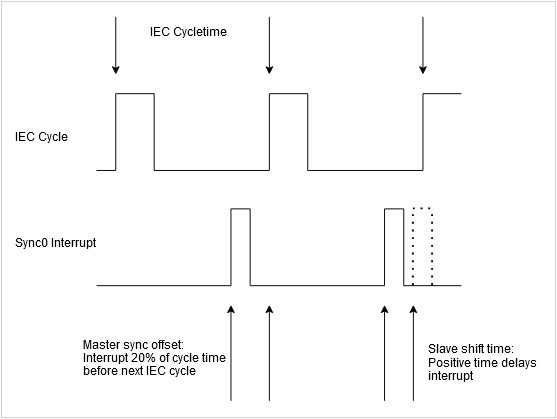 対応するスレーブでDCがアクティブな場合、デフォルト設定はそれぞれのESIファイルから取得されます。デバイスメーカーは、ここで以下の形式で追加のオフセットを定義できます。シフト時間両方同期 0そして同期 1タイマー割り込み。 スレーブ側でエキスパート設定が有効になっている場合、これらの時間を手動で変更できます。シフト時間登録簿に登録される 重要同期割り込みがIECサイクルの直前に発生することは絶対に避けなければなりません。そうしないと、1サイクル分のデータが存在できなくなり、デバイスが同期エラーに陥ってしまうからです。そのためには、マスターからのオフセットと各スレーブの個別オフセットの両方を考慮する必要があります。 マスターのオフセットを 20%、スレーブのオフセットを 0% に通常設定した場合、 IEC サイクルのジッターとシステムによる送信タイミングの遅延は最大 +80% と –20% になります。 |
同期ウィンドウ監視 |
|
同期ウィンドウ | 時間です同期ウィンドウ監視すべてのスレーブの同期がこの時間枠内であれば、変数 |
LWR/LRD の代わりに LRW を使用 |
|
タスクごとのメッセージ |
|
スレーブを自動起動 |
|
この機能により、外部デバイス設定ツールからメールボックスゲートウェイを経由してEtherCATデバイス。配線を変更する必要はありません。 一般に、指定されたすべてのメールボックス プロトコル (CoE、FoE、VoE、 SoE) を使用できます。 | |
有効 |
|
IP アドレス | UDP接続用のIP アドレス。UDPポートは0x88a4に設定されています。 オプション
|
これらの設定は、自動構成 マスター/スレーブオプションが無効になっている場合、自動的に削除され、ここには表示されません。 | |
イメージ イン アドレス | 入力データの最初のスレーブの最初の論理アドレス |
イメージ アウト アドレス | 出力データの最初のスレーブの最初の論理アドレス |