Kin_ArticulatedRobot_6DOF (FB)¶
FUNCTION_BLOCK Kin_ArticulatedRobot_6DOF EXTENDS Kin_Coupled
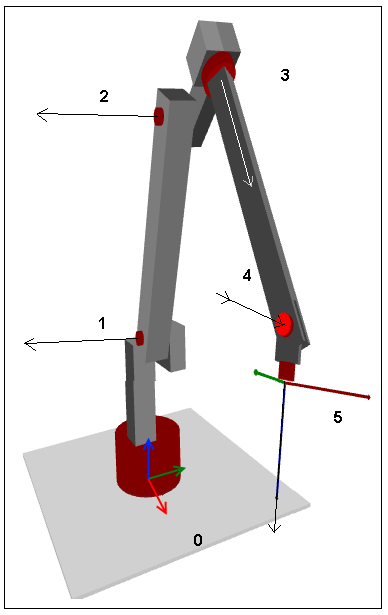
Bloc fonctionnel de transformation pour robot d’articulation 6 axes.
Le système de coordonnées de la machine est montré à la base de l’axe 0.
Système de coordonnées de la machine (MCS) |
|
|---|---|
Origine |
Intersection de l’axe 0 avec la base du robot. |
X |
Pointe « vers l’avant » en direction du point de centre d’outil. |
Y |
Défini par X et Z de sorte que le MCS devienne droitier. |
Z |
Pointe vers le haut. |
Le sens de rotation est indiqué par des flèches noires. Les flèches pointent le long de l’axe. Le sens de rotation positif est donné par la règle de la main droite. Par exemple, si l’axe 0 est tourné dans le sens positif, le robot tourne dans le sens antihoraire vu du dessus. Les trois axes d’orientation de la main de robot se recoupent en un point appelé centre de poignet.
The location of the tool coordinate system (TCS) relative to the MCS in zero position:
Tool coordinate system (TCS) |
|
|---|---|
Origine |
Relative to MCS: dX = a1 + d4 + d6 dY = -d3 dZ = d1 + a2 + a3 |
X |
Along the Z-Axis of the MCS in positive direction |
Y |
Along the Y-Axis of the MCS in negative direction |
Z |
Along the X-Axis of the MCS in positive direction |
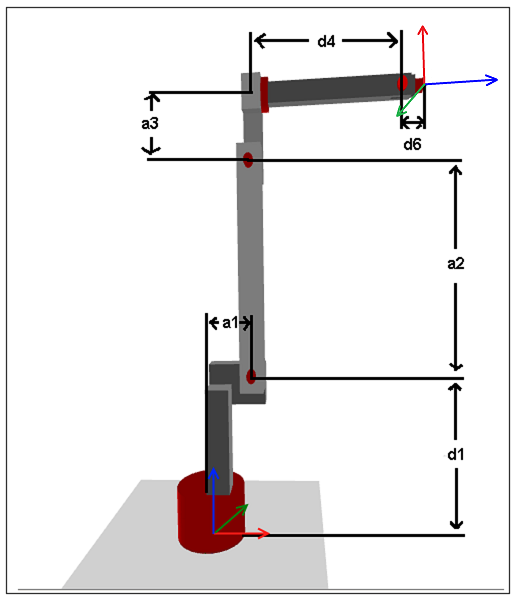
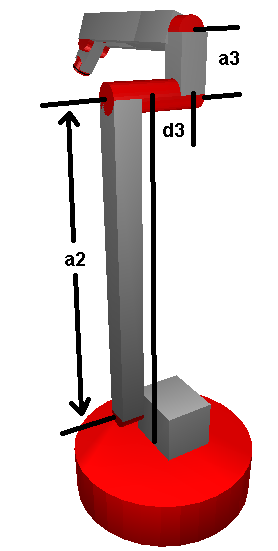
La figure à gauche montre la position de référence de la cinématique, c.-à-d. la position à laquelle tous les axes sont à leur position de zéro. Les noms et les signes des paramètres suivent la notation de Denavit-Hartenberg. La figure à droite montre le paramètre Denavit-Hartenberg supplémentaire d3.
Les robots présentant la configuration Denavit-Hartenberg ci-dessous sont pris en charge (les valeurs de d_i et a_i sont données au sein de la configuration) :
Numéro d’articulation |
Décalage d’articulation |
Décalage de lien d_i |
Longueur de lien a_i |
Torsion de lien |
0 |
0° |
d1 |
a1 |
90° |
1 |
90° |
0 |
a2 |
0° |
2 |
0° |
d3 |
a3 |
90° |
3 |
0° |
d4 |
0 |
90° |
4 |
0° |
0 |
0 |
-90° |
5 |
0° |
d6 |
0 |
0° |
À l’inverse de notre notation, l’axe Z du système de coordonnées d’outil pointe vers l’outil, c.-à-d. à l’opposé du robot.
Les différentes valeurs d’axe sont interprétées comme suit :
a0 |
Position du premier axe rotatif en degrés |
a1 |
Position du second axe rotatif en degrés |
a2 |
Position du troisième axe rotatif en degrés |
a3 |
Position du quatrième axe rotatif en degrés |
a4 |
Position du cinquième axe rotatif en degrés |
a5 |
Position du sixième axe rotatif en degrés |
The zero position of the kinematics can be adjusted by defining
constant offsets for the axes. See inputs dOffsetA0, dOffsetA1,
dOffsetA2, dOffsetA3, dOffsetA4 and dOffsetA5.
Changing the offsets affects the location and orientation of the TCS.
Les axes sont limités comme suit :
Axe |
Configurable |
Par défaut |
Min/Max |
a0 |
OUI |
[-180°; 180°] |
Illimité |
a1 |
OUI |
[-180°; 180°] |
Illimité |
a2 |
OUI |
[-90°; 180°] |
Illimité |
a3 |
OUI |
[-180°; 180°] |
Illimité |
a4 |
OUI |
[-180°; 180°] |
[-180°; 180°] |
a5 |
OUI |
[0°; 360°] |
Illimité |
Configurable signifie que les limites peuvent être personnalisées en définissant et en activant des limites logicielles dans l’axe mappé. Si les limites du logiciel ne sont pas activées, la cinématique utilise les valeurs par défaut.
Remarque : Les limites personnalisées doivent être dans la plage Min/Max, sinon une erreur est signalée.
- Attributs :
sm_kin_libdoc- InOut :
Domaine de validité
Nom
Type
Commentaire
Hérité de
Entrée
itfPosKinitfOriKind1LREALParamètre Denavit-Hartenberg d1, >= 0
a1LREALParamètre Denavit-Hartenberg a1, >= 0
a2LREALParamètre Denavit-Hartenberg a2, > 0
d3LREALParamètre Denavit-Hartenberg d3
a3LREALParamètre Denavit-Hartenberg a3, >= 0
d4LREALParamètre Denavit-Hartenberg d4, >= 0
d6LREALParamètre Denavit-Hartenberg d6, >= 0
dOffsetA0LREALDécalage supplémentaire de l’axe A0. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
dOffsetA1LREALDécalage supplémentaire de l’axe A1. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
dOffsetA2LREALDécalage supplémentaire de l’axe A2. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
dOffsetA3LREALDécalage supplémentaire de l’axe A3. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
dOffsetA4LREALDécalage supplémentaire de l’axe A4. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
dOffsetA5LREALDécalage supplémentaire de l’axe A5. Ce décalage est soustrait avant la transformation directe et ajouté après la transformation inverse.
Properties:
NumAxes, inherited from Kin_Coupled
Methods:
ActivateAutomaticRotaryPeriods, inherited from Kin_Coupled
AxesToCartesian, inherited from Kin_Coupled
AxisSettings, inherited from Kin_Coupled
CPConnectible, inherited from Kin_Coupled
CartesianToAxes, inherited from Kin_Coupled
GetAxisMapping, inherited from Kin_Coupled
GetAxisMapping2, inherited from Kin_Coupled
GetAxisProperties, inherited from Kin_Coupled
GetConfigurationDataSize, inherited from Kin_Coupled
GetDefaultConfigurationData, inherited from Kin_Coupled
GetFlangeOrientationImageTotal, inherited from Kin_Coupled
GetFlangeOrientationImageWithOri, inherited from Kin_Coupled
GetPeriods, inherited from Kin_Coupled
GetPosAndToolKinematics, inherited from Kin_Coupled
IsConfigSingular, inherited from Kin_Coupled
IsInitialized, inherited from Kin_Coupled
IsSingularity, inherited from Kin_Coupled
JoinAxes, inherited from Kin_Coupled
JoinConfig, inherited from Kin_Coupled
SplitAxes, inherited from Kin_Coupled
SplitConfig, inherited from Kin_Coupled
Structure: