Général
Important
Aucun autre bus de terrain ou trafic réseau supplémentaire ne peut être exploité sur cette interface. Utilisez une carte réseau dédiée pour EtherCAT, sinon la capacité en temps réel ne peut pas être garantie.
La configuration de EtherCAT Les modules sont basés sur les fichiers de description des appareils maîtres et esclave utilisés et peuvent être adaptés au projet via les boîtes de dialogue de configuration. Pour une utilisation aussi simple et sans erreur que possible, nous recommandons, pour les applications standard, d'activer l'option Configuration automatique du maître afin que la majorité des paramètres de configuration soient effectués automatiquement.
Exigences
Le pilote Npcap est requis lors de l'utilisation EtherCAT appareils avec un CODESYS Control Win Le logiciel Npcap est par exemple inclus dans la configuration de Wireshark. Après l'installation du pilote ou l'insertion d'une carte réseau USB, il est nécessaire de redémarrer Windows pour pouvoir sélectionner les cartes.
Important
Cette note est valable uniquement pour CODESYS versions jusqu'à SP18.
Installez le logiciel WinPCap.
Par défaut, Npcap est également installé avec Wireshark. Vous devez désactiver cette option dans la configuration de Wireshark, car Npcap ne doit pas être installé sur le système.
Lors de l'utilisation CODESYS Control RTE WinPCap ou Npcap n'est pas requis. Vous devez remplacer le pilote réseau par défaut dans le Gestionnaire de périphériques Windows par un pilote spécifique. CODESYS conducteur.
Pour plus de détails, consultez l'aide de la CODESYS Control RTE système d'exécution sous Composants ou pilotes dynamiques disponibles.
Vous devez également activer les composants d'exécution respectifs dans le fichier CODESYSControl_User.cfg.
Component.<subsequent number> = CmpEt100DrvDisponible pour Intel Pro 100
Component.<subsequent number> = CmpEt1000DrvDisponible pour Intel Pro 1000
Component.<subsequent number> = CmpRTL81x9MpdDisponible pour RTL8139
Component.<subsequent number> = CmpRTL8169MpdDisponible pour Realtek RTL8169 ou RTL8168 (version PCIe)
Astuce
Vous pouvez également activer les composants d'exécution dans la boîte de dialogue de configuration du CODESYS Control RTE.
Pour plus d'informations, consultez les éléments suivants : CODESYS Control RTE V3
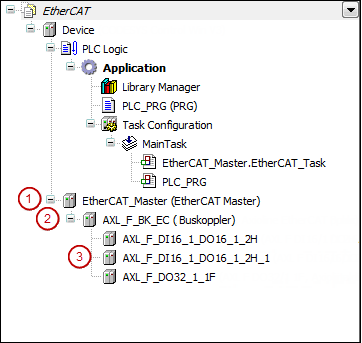
EtherCAT Arborescence des périphériques



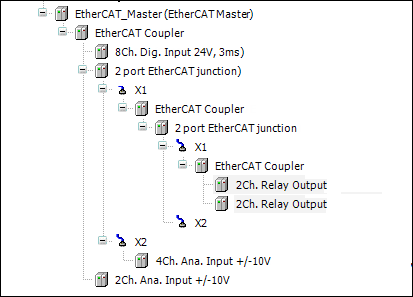
EtherCAT Topologie
En plus de la topologie linéaire et arborescente, CODESYS prend également en charge la EtherCAT topologie en étoile. Spécial EtherCAT succursales (un port à 2 ports EtherCAT jonction dans l'exemple) sont nécessaires à la configuration d'un EtherCAT topologie en étoile. Une topologie modulaire EtherCAT Une étoile peut être créée en utilisant plusieurs branches. Ainsi, des dispositifs individuels ou complets EtherCAT les lignes peuvent être connectées aux branches. Un EtherCAT la branche est identifiée par le  symbole.
symbole.
Dispositifs optionnels
Le Dispositifs optionnels Cette fonction peut être utilisée pour des configurations matérielles variables. Au début de la pile, le système vérifie si des périphériques optionnels sont disponibles. Si les périphériques ne sont pas trouvés, ils sont automatiquement désactivés. Cependant, les périphériques peuvent également être activés ultérieurement, par exemple s'il s'agit d'un périphérique en bout de ligne réseau. En revanche, si Redémarrage automatique esclaves Si l'option est sélectionnée, les appareils activés sont automatiquement commutés sur « opérationnel », activant ainsi les données de processus.
Astuce
La tâche du cycle de bus est définie dans les paramètres généraux de l'API.
Accès à la EtherCAT la configuration par l'application s'effectue via des instances du EtherCAT Maître et le EtherCAT Esclaves. Quand le EtherCAT Maître ou le EtherCAT Les Esclaves sont insérés comme objets dans un projet ; des instances sont créées automatiquement pour le maître et les esclaves , et peuvent être traitées dans le programme d'application. Par exemple, un redémarrage, un arrêt ou une vérification d'état de l'esclave EtherCAT l'appareil peut être exécuté à partir de l'application.
La bibliothèque IODrvEtherCAT fournit des blocs fonctionnels pour la lecture et l'écriture de paramètres individuels, même pendant le fonctionnement du bus.
