Languette: EtherCAT Maître – Général
L'onglet est utilisé pour la configuration des paramètres de base du EtherCAT Maître. Les paramètres de base sont prédéfinis à partir du fichier de description de l'appareil.
Paramètres des paramètres de configuration
Important
Le mode de configuration automatique (Autoconfiguration maître/esclaves L'option « Auto-configuration » est sélectionnée par défaut et convient aux applications standard. Si ce mode n'est pas sélectionné, tous les paramètres de configuration du maître et des esclave doivent être définis manuellement. Cette opération requiert des connaissances spécialisées. L'option « Auto-configuration » doit être désactivée pour configurer la communication entre esclaves.
Autoconfiguration maître/esclaves |
Même si cette option du maître est sélectionnée, un mode expert peut être activé explicitement pour chaque esclave individuel, ce qui permet l'édition manuelle de la configuration des données de processus générée automatiquement. |

Adresse cible (MAC) | Adresse MAC de l'appareil dans le EtherCAT réseau qui doit recevoir les télégrammes. . Options
|
Adresse source (MAC) | Adresse MAC du contrôleur (système cible) ou nom du réseau (nom de l'adaptateur ou de l'API (système cible)) |
Nom de réseau | Nom ou MAC du réseau, selon l'option sélectionnée parmi les suivantes : |
Sélectionner réseau via MAC |
|
Sélectionner réseau via nom |
|
Balayage | Analyse le réseau à la recherche des identifiants MAC ou des noms des périphériques cibles actuellement disponibles. |
Ces paramètres ne s'affichent que lorsque le Redondance L'option est sélectionnée. Ici, les paramètres du périphérique supplémentaire sont définis selon la description de Paramétrage EtherCAT NIC. |
Temps de cycle (µs) | Durée après laquelle un nouveau télégramme de données est envoyé sur le bus. Lorsque le Horloge distribuée Lorsque la fonction est activée sur l' esclave, le temps de cycle maître spécifié ici est transmis aux horloges esclave . Cela permet une synchronisation précise des échanges de données. Ceci est particulièrement important lorsque des processus distribués spatialement nécessitent des actions simultanées. Par exemple, les applications où plusieurs axes doivent exécuter des mouvements coordonnés simultanément constituent une action simultanée. Une base de temps très précise, couvrant tout le réseau, avec une gigue nettement inférieure à 1 microseconde peut ainsi être obtenue. |
Décalage Sync | Paramètre permettant de régler le temps de retard entre la base de temps DC de l' EtherCAT Esclave et démarrage du cycle de l'automate. La valeur par défaut est de 20 %. Ce délai est actif simultanément pour tous les esclaves alimentés en DC. Un décalage de 20 % signifie que l'interruption du temporisateur est activée. EtherCAT Esclave a lieu 20% avant le prochain cycle IEC. Cela signifie que dans le cas de
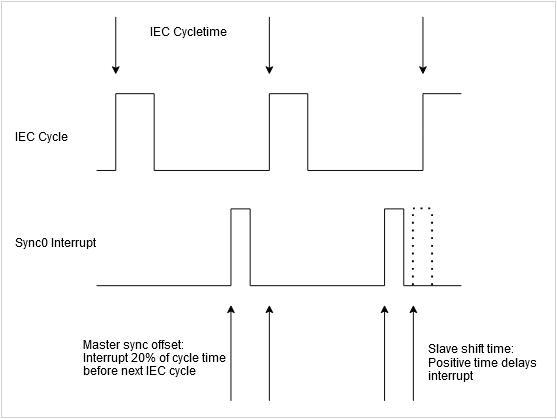 Si le DC est actif sur l' esclave correspondant, les paramètres par défaut proviennent du fichier ESI correspondant. Le fabricant de l'appareil peut définir ici des décalages supplémentaires sous la forme Shift Time pour les deux Sync 0 et Sync 1 interruptions de minuterie. Lorsque le réglage expert est activé sur l' esclave, ces temps peuvent être modifiés manuellement. Shift Time est inscrit au registre ImportantIl est impératif d'éviter que l'interruption de synchronisation se produise à proximité du cycle IEC, car sinon, aucune donnée ne peut être disponible pendant un cycle et les appareils se retrouveront en erreur de synchronisation. À cet effet, les décalages du maître et de chaque esclave doivent être pris en compte. Avec le réglage normal de 20 % de décalage pour le maître et de 0 % pour les esclaves, la gigue du cycle IEC et les retards de la synchronisation de transmission par le système peuvent être au maximum de +80 % et –20 %. |
Surveillance fenêtre Sync |
|
Fenêtre Sync | Il est temps pour Surveillance fenêtre Sync. Lorsque la synchronisation de tous les esclaves se fait dans cette fenêtre temporelle, la variable |
Utiliser LRW au lieu de LWR/LRD |
|
Messages par tâche |
|
Redémarrage automatique esclaves |
|
Cette fonctionnalité permet la communication depuis un outil de configuration de périphérique externe via la passerelle de boîte aux lettres vers le EtherCAT appareils. Le câblage n'a pas besoin d'être modifié. En général, tous les protocoles de boîte aux lettres spécifiés (CoE, FoE, VoE, SoE) peuvent être utilisés. | |
Activer |
|
Adresse IP | Adresse IP de la connexion UDP. Le port UDP est défini sur 0x88a4. Options
|
Ces paramètres ne peuvent être modifiés que lorsque le Autoconfiguration maître/esclaves L'option est désactivée. Sinon, l'opération est automatique et ils ne sont pas visibles ici. | |
Image In Address | Première adresse logique du premier esclave pour les données d'entrée |
Image Out Address | Première adresse logique du premier esclave pour les données de sortie |