EtherCAT Safety Module
Using the EtherCAT Safety Slave
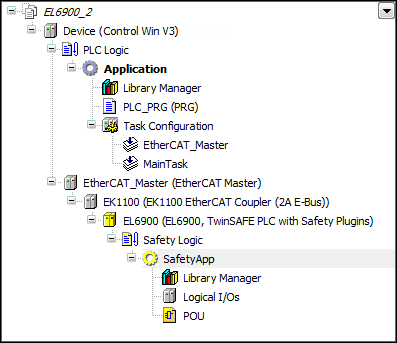
The EtherCAT Safety Modules EL6900 and EL6910 are added under an EtherCAT bus coupler (e.g. EK1100). The EtherCAT Safety EK1960 is added under the EtherCAT Master.
To do this, select the bus coupler or the master and click Add Device in the context menu with the selection of the EtherCAT Safety Module. Alternatively, you could also select the bus coupler or master and select and add the controller by clicking Scan For Devices in the context menu.
The Safety Logic logical node, the SafetyApp safety application object, the Library Manager, and the Logical I/Os node are automatically added under an EtherCAT Safety Module.
You can update the EtherCAT Safety Module to a newer version of the device description by clicking Update Device in the context menu. In the process, libraries may be replaced by newer versions.
The configuration editor of the EtherCAT Safety Module contains the General, Parameter, Safety Parameter, I/O Mapping, Online, CoE Online, Status, and Informationtabs. Depending on the contents of the ESI file, the Diagnosis History tab may also be displayed.
The General tab shows the basic settings for the slave as defined in the device description file. A detailed description of these parameters as well as the other tabs can be found in the general description of an EtherCAT Slave.
The Tab: Safety Parameter tab contains the settings specific to this slave as well as commands for data transfer.
Using the Safety Module as an EtherCAT Slave
The EtherCAT Safety Module is an EtherCAT Slave. For this reason, diagnostic information from CODESYS fieldbus support is also displayed for the module, which could be of interest if problems occur.
For more information, see:
Using AX8xxx Drives
The AX8xxx drive is a EtherCAT Slave with integrated drive safety functions (SOS, SLS, etc.)
After the ESI file is imported, the drive can be connected to a TwinCAT Module for STO. However, it cannot be programmed with the CODESYS Safety for EtherCAT Safety Module add-on. Therefore, the special safety functions of the AX8xxx are not available (unless the drive is programmed with TwinCAT for additional functions).
In the device tree, the terminal is represented as an EtherCAT Module (EtherCAT Safety SC Module) with the EtherCAT settings and standard I/O channels, and as a submodule for the TSC connection to the safety controller.
Tip
For a complete description of the terminals with technical data and information on standard I/O channels and configuration, see the corresponding device documentation. For application examples with TwinSAFE-SC terminals, see the TwinSAFE application manual from Beckhoff.
Configuring the Safety Parameter
Safety-specific parameter of the EtherCAT Safety Module
For more information, see: Tab: Safety Parameter