運動学を含む CODESYS SoftMotion
表 62. ガントリーシステム
名前 | 表現 | 方向運動学とリンク可能 | 追加情報 |
|---|---|---|---|
Gantry2 | ✓ | ||
Gantry3 | ✓ | ||
HGantry2 | 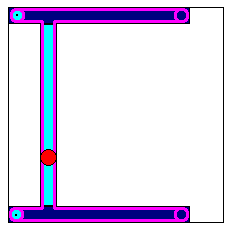 | ✓ | |
HGantry3 | 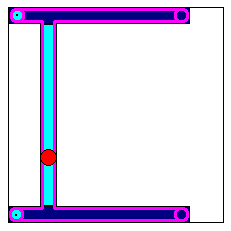 | ✓ | |
TGantry2 |  | ✓ | |
5軸ガントリー | -- |
表 63. SCARAシステム
名前 | 表現 | 方向運動学とリンク可能 | 追加情報 |
|---|---|---|---|
ポーラー |  | ✓ | |
Z軸付き極座標 | 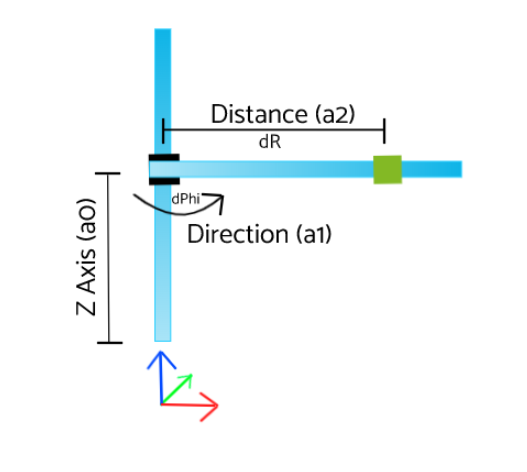 | ✓ | |
Z軸付きScara2 | 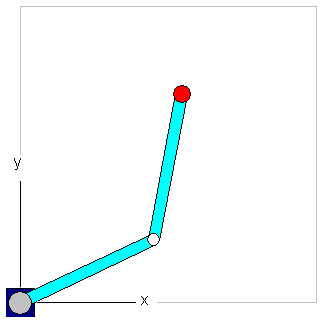 | ✓ | |
Z軸付きScara3 | 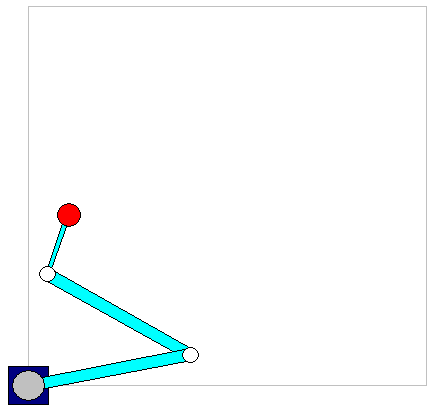 | -- |
表 64. 多関節ロボット
名前 | 表現 | 方向運動学とリンク可能 | 追加情報 |
|---|---|---|---|
3つの回転軸を備えた多関節ロボット | 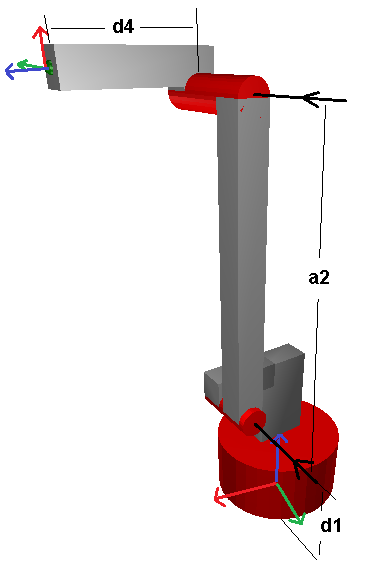 | ✓ | |
4軸パレタイザー | 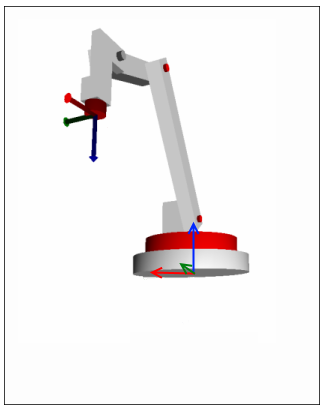 | -- | |
6軸多関節ロボット | 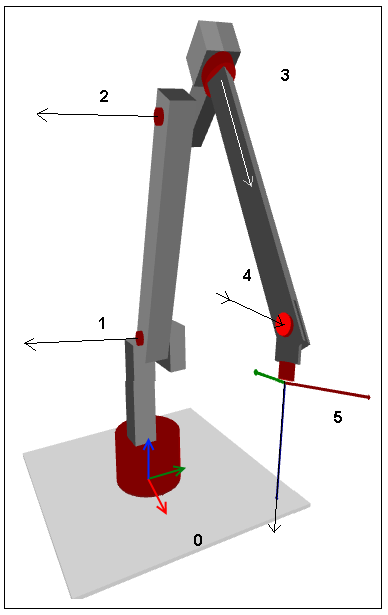 | -- |
表 65. 並列システム
名前 | 表現 | 方向運動学とリンク可能 | 追加情報 |
|---|---|---|---|
回転軸付きバイポッド | ✓ | ||
回転軸付き三脚 | 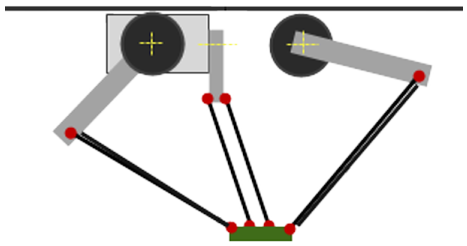 | ✓ | |
直線軸付き三脚 | 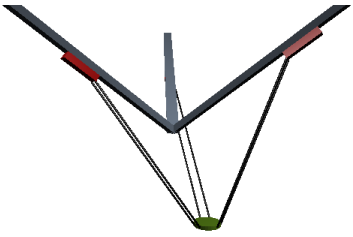 | ✓ |
表 66. 方向運動学
名前 | 表現 | 追加情報 |
|---|---|---|
C軸 | ||
ツール付きC軸 | ||
道具 | ||
Wrist2 |  | |
Wrist3 |