軸グループを制御するプログラムの作成方法
次の手順では、軸グループを制御するためのプログラムを作成する方法について説明します。
要件:プロジェクトは、で指定されているように、軸グループで作成されています 軸グループを作成する方法 章。
軸グループを制御するためのプログラムは、 PLC_PRG 実装言語としてCFCを使用したPOU。
を開きます
PLC_PRGエディターのプログラム。をドラッグします 箱 エディターへの要素。
機能ブロックをマッピングする
SMC_GroupPower箱に。次の図に従って機能ブロックを構成します。
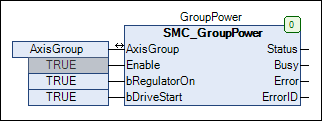
説明:
ファンクションブロックは軸グループのドライブを起動します。
出力
Statusコントローラの有効化が成功したことを示します。
タイプの機能ブロックを作成します
MC_GroupEnable。この機能ブロックは、リンクされた軸の制御を 軸グループ 軸グループ。
を接続します。
Statusの出力SMC_GroupPowerファンクションブロックからExecuteの入力MC_GroupEnableファンクションブロック。
説明:
すべての軸コントローラに電源が入っている場合(
Status = TRUE)の場合、軸の制御は軸グループに転送されます。の
Done出力はコマンドの成功を報告します。
を挿入します
MC_MoveDirectAbsoluteドライブを実行するための機能ブロック。を接続します。
Doneの出力MC_GroupEnableファンクションブロックからExecuteの入力MC_MoveDirectAbsoluteファンクションブロック。次のようにプログラムを拡張します。
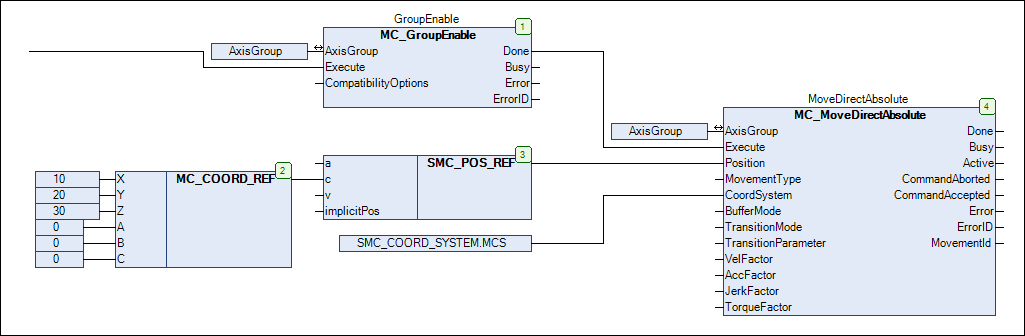
説明:
の
MC_MoveDirectAbsoluteファンクションブロックはPTP動作を命令し、 軸グループ 軸グループ。この例では、キネマティクスは位置 (X = 10、Y= 20、Z = 30) に移動します。この値は、
Position経由で入力SMC_POS_REF構造。位置は機械座標系 (MCS) で指定されます。座標系は次の方法で選択されます。
CoordSystem入力。
プログラムの開始
プログラムが完全に作成され、エラーなくコンパイルできる場合は、それをコントローラに転送できます。
開始する CODESYS Control Win ランタイムシステム(
CODESYSControlService.exeプログラム"...\GatewayPLC"ディレクトリ)。入れて 通信設定 コントローラーへの接続パス。
クリック オンライン → ログイン。
プロジェクトをコントローラーにダウンロードします。
クリック 。
クリック デバッグ → 始める。
軸の位置が変わります。
クリック デバッグ → 始める。
軸の位置が変わります。