その他の軸
追加軸は、軸グループの一部ではあるがキネマティクスの一部ではない軸です。キネマティクスの調整された動きと同期して動かすことができます。追加した軸とキネマティクスの軸が動き始め、同時に目標位置に到達します。追加の軸の動きはバッファされ、調整された動きとブレンドされます。同じことが、キネマティクスの動きを一切加えずに、軸の動きを純粋に追加する場合にも当てはまります
単軸移動との違い
次のようなファンクションブロックで操作される単軸移動との主な違い MC_MoveAbsolute または MC_MoveRelative はムーブメントの同期です。同期が重要でない場合は、1 軸のファンクションブロックを使用して座標軸を操作すると軸の移動速度が速くなるため、意味がある場合があります。もう 1 つの違いは、追加の軸は軸グループと一緒に管理されることです。これらは以下で有効になります SMC_GroupPower また、エラーは次の方法でリセットできます。 MC_GroupReset。なお、追加軸の単軸誤差は軸グループ誤差の原因となります
さらなる軸の動きを指揮
追加の軸の動きを指示するときは、軸グループの主な動きが絶対的か相対的かにかかわらず、いつでも絶対移動と相対運動のどちらかを選択できます。たとえば、軸の相対的な移動を同期して指示できます MC_MoveLinearAbsolute コマンド。
その他の軸の動きは、以下のコマンドで制御されます。 AdditionalAxes 軸グループのモーションファンクションブロックの入力。たとえば、PTP の絶対移動と軸の相対的な移動は、次のように命令できます
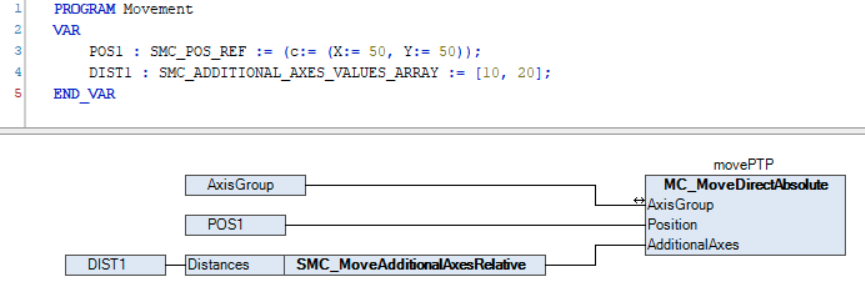
追加の軸だけを移動させる場合は、長さが 0 の調整された移動になります (たとえば、 MC_MoveDirectRelative 距離あり 0) は追加の軸移動と同時に命令できます。
[メモ]
モジュロ軸は追加の軸としてもサポートされています。これらは常に以下のように操作されます。
shortest軸の動きを絶対的に追加するモード。詳細については、以下を参照してください。 MC_DirectionMC_Direction
追加する軸の最大数は、ライブラリパラメーターによって制限されます。
MAX_NUM_ADDITIONAL_AXESからSM3_CPKernelDefaultsライブラリ。このパラメーターはライブラリマネージャーで変更できます。追加軸の使用方法の例については、以下を参照してください。 ロボット工学における追加軸の使用