CP運動の方向補間
などのCPムーブメントの場合 MC_MoveLinearAbsolute、 MC_MoveLinearRelative、 MC_MoveCircularAbsolute、 また MC_MoveCircularRelative、ツールの任意のターゲット方向は、ムーブメントのターゲット位置によって指定できます。その結果、ツールの先端がパス上を移動するパスの移動中に、ツールの方向がターゲットの方向に変換されます。方向補間の場合、軸座標(ACS)またはマシン座標(MCS)のいずれかで、ターゲットの方向が指定された座標系に違いはありません。
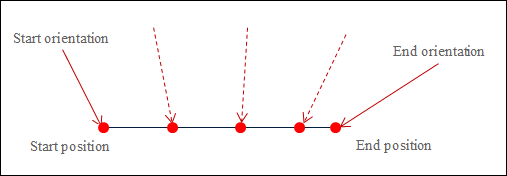
次の画像は、同時方向補間を使用した線形補間を示しています。赤い矢印は、始点と終点でのツールの方向を示しています。赤い破線は、補間中にツールがいくつかの場所にどのように配置されるかを示します。
パス移動に関する上記の機能ブロックには、 OrientationMode 入力。この入力は、開始方向がターゲット方向に渡される方法を定義します。
大圏補間(
SMC_Orientation_Mode.GreatCircle)これはデフォルト設定です。この設定では、開始方向も最短距離でターゲット方向に渡されます。最短距離とは、回転の進行角度が最小になるように、ツールがターゲット方向に回転することを意味します。
軸方向補間(
SMC_Orientation_Mode.Axis)
-360°から360°の値の範囲のC軸を持つガントリーを考えてみましょう。開始方向はC = 179°で、目標方向はC = -175°です。大円補間は、ZYZオイラー角(A、B、C)のC軸を、180°を過ぎた正の方向の179°から185°までのパス上の移動距離に比例して移動します。これは-175°に対応します。この場合、それは6°の合計角度を移動します。
-180°から180°の値の範囲のC軸を持つガントリーをもう一度考えてみましょう。開始方向はC = 179°で、目標方向はC = -175°です。軸補間により、ガントリーのC軸は、パス上の移動距離に比例して、179°から負の方向に0°を超えて-175°まで移動し、合計角度は354°になります。 (この例で大円補間を使用した場合、C軸の作業スペースを超えていたため、エラーが発生していました。)
大円補間では、工具の向きの変化を予測できます。軸補間では、方向軸が位置によって方向に異なる影響を与える可能性があるため、方向の変化を予測することは困難です。軸方向補間は、この特性をPTPの動きと共有します。 (ただし、これは、軸方向補間の空間内のパスを予測することが難しいことを意味するものではありません。パスは両方のタイプの方向補間で同じであり、TCPは常に定義された輪郭を正確に移動します。)
大円補間では、標定運動学の特異点を移動することはできません。これは、軸補間で簡単に可能です。
大円補間では、2 番目の例で述べたように、方向軸の軸制限に違反する可能性があります。したがって、コマンドを発行するときには、最短の回転で目標方向に移動するときに軸制限に違反していないことを確認する必要があります。
軸補間を使用すると、360° を超えて回転できます。方向軸の作業領域が 360° を超える場合、たとえば、位置 180° ではなく位置 540° に移動できます。これは、ツールの同じ方向に対応します。大円補間では、これは不可能です。ターゲット方向への最短の回転は、常に合計角度が最大 180° に相当します。
軸方向の補間には、位置とツールのキネマティクスで構成される結合キネマティクスが必要です。位置部分はインターフェースを実装する必要があります
ISMPositionKinematics_Offset2。キネマティクスに回転軸がなく、インターフェースを実装している場合
ISMPositionKinematics、次に選択した方向モード(SMC_Orientation_Mode)は無視されます。
軸方向補間の特異点
軸方向補間を使用すると、方向運動学の特異点を介してパスの移動を行うことができ、プログラミングが大幅に容易になります。この目的のために、位置運動学の特異点が変化します。
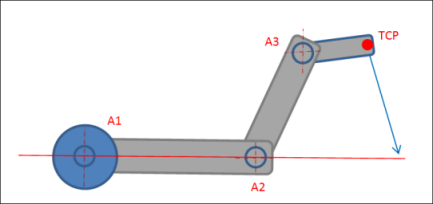
大きな円補間の場合、フランジ点(A3)が最初のアーム部分によって定義された線上にある場合(2番目の関節角度が0°の場合)、Scara3_Zは特異点を持ちます。
軸方向補間の場合、位置キネマティクスの特異点が変化するため、TCPはフランジポイント(A3)とは異なる役割を果たします。この特異性は、TCP(フランジポイントではない)が最初のアーム部分によって定義された線上にある場合に発生します。軸方向補間を使用して移動を指令する場合、この変更された特異点が移動の開始位置と目標位置の間にあるかどうかがチェックされます。その場合、移動は受け入れられず、エラーが発行されます。
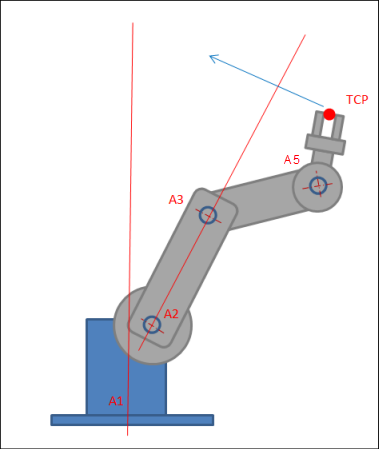
6軸関節式アームロボットの場合、状況はScara3_Zに匹敵しますが、2つの特異点が考えられます。 1つ目は、TCPがA2とA3を通る回線上にある場合に発生します。 2つ目は、TCPがA1を通る回線上にある場合に発生します。司令部はまた、特異点が通過していないことをここでチェックします。
ヒント
軸方向補間を使用して移動すると、Scara3(または6軸関節式アームロボット)の構成が変更される場合があります。ただし、移動の終了時には、ロボットが開始点で持っていたのと同じ構成が常に適用されます。