ロボット工学における追加軸の使用
ザ・ Robotics_AdditionalAxes.project サンプルプロジェクトでは、ロボット工学における追加軸の設定方法と使用方法を示しています。追加軸とは、ロボットの協調動作と同期して移動する軸です
プロジェクトは、のインストールディレクトリにあります CODESYS 下に ..\CODESYS SoftMotion\Examples。
アプリケーションの構造
軸グループは、以下で設定されます。 軸グループ オブジェクト。3 軸 (2 つの回転軸と 1 つの直線 Z 軸) のスカラロボットを使用します
さらに 2 つの軸が以下に追加されました。 軸の追加 そして、2 つの軸にリンクされています。 DriveAdd1 と DriveAdd2。
ザ・ PLC_PRG プログラムには、プログラムフロー用のシンプルなステートマシンが含まれています。まず、軸グループが有効な状態になります 0そして、その位置への PTP 移動 (X=50, Y=50) が実行されます。その後、これを直線的な動きにブレンドして位置を決めます。 (X=50, Y=-50)。
最初のロボットの動きでは、距離に応じて軸が相対的に移動します (10, 20) 命令されます。2 回目のロボットの移動では、追加する軸の距離は (-10, -20)。
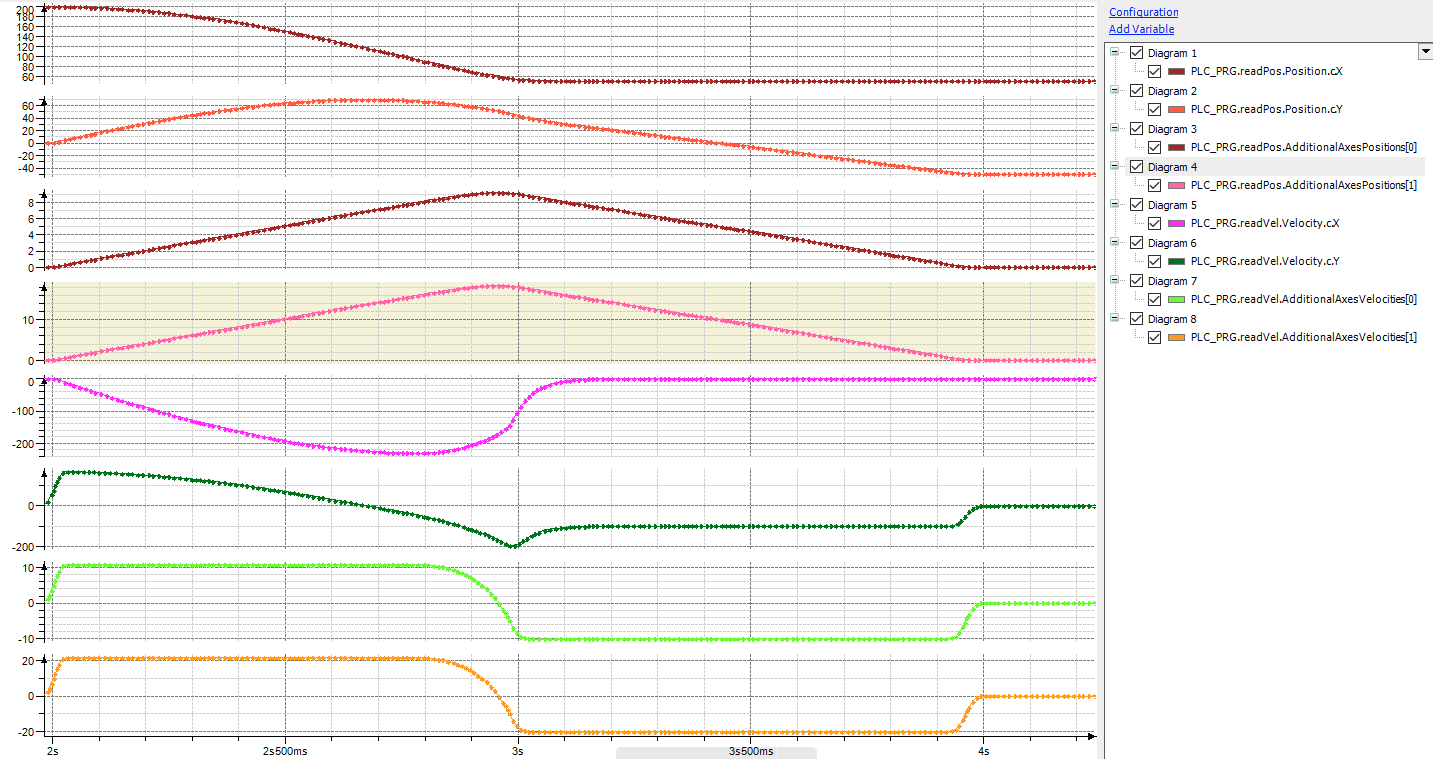
ザ・ MC_GroupReadActualPosition そして MC_GroupReadActualVelocity ファンクションブロックは、キネマティクスと追加軸の位置と速度を読み取るために使用されます。
コミッショニング
アプリケーションをビルドし、コントローラーにダウンロードします。
トレースを開き、コントローラにダウンロードします。
アプリケーションを起動します。
X 座標と Y 座標、およびトレース内の 2 つの追加軸の動きを追跡できます。