Funzioni
Sicurezza CANopen
CANopen Safety è uno standard europeo (EN 50325-5). Ciò significa che i dati possono essere trasmessi tramite reti CAN che soddisfano i requisiti per le applicazioni SIL3. Questa trasmissione dati orientata alla sicurezza può avvenire parallelamente a una trasmissione dati CANopen esistente. CODESYS CANopen Safety supporta i requisiti di sicurezza secondo SIL2.
Oltre ai servizi CANopen convenzionali per la trasmissione dati, come SDO e PDO, per l'estensione di sicurezza è definito un servizio specifico per questa trasmissione dati con il servizio SRDO (Safety Related Data Object). Per quanto riguarda la configurazione e il tipo di comunicazione, è simile a un PDO, ma sono definite proprietà aggiuntive.
Per utilizzare CANopen Safety, il CANopen Manager SIL2 viene inserito nell'albero dei dispositivi al posto del CANopen Manager. Sia i dispositivi sicuri (icona gialla) che quelli non sicuri (icona grigia) possono essere inseriti sotto questo gestore. Di conseguenza, è possibile gestire in parallelo sia i sottoscrittori CAN sicuri che quelli non sicuri. I sottoscrittori sicuri dispongono di pagine specifiche per la sicurezza, oltre alle consuete pagine di configurazione. In queste pagine è possibile configurare gli SRDO ( PDO sicuri) e i relativi CRC. Oltre alle consuete istanze dei dispositivi non sicuri, viene generata un'istanza aggiuntiva con prefisso "S_" per ciascun dispositivo di sicurezza (CANopen MANAGER e slave). Ciò fornisce funzionalità diagnostiche specifiche per la sicurezza.
L'utilizzo di CANopen Manager SIL2 richiede un runtime CODESYS SIL2 con un mini-driver CAN appositamente adattato e un plug-in CODESYS SIL2. Le librerie e i dispositivi necessari sono già inclusi nell'installazione standard.
Ridondanza
Con il CODESYS Redundancy Toolkit consente di utilizzare due CANopen Manager in una configurazione ridondante. In questo caso, il controllore passivo monitora le attività del controllore attivo e ne assume il ruolo attivo quando viene rilevato un errore di comunicazione. Il monitoraggio avviene tramite due meccanismi paralleli:
Monitoraggio del CODESYS Redundancy Toolkit (principalmente tramite Ethernet)
Monitoraggio dell'heartbeat del CANopen Manager. Il timeout desiderato viene impostato nel configuratore del CANopen Manager.
Suggerimento
IL "CODESYS Per la funzione "Ridondanza" è necessario il componente aggiuntivo "Redundancy Toolkit". Inoltre, è necessario configurare la ridondanza nell'albero dei dispositivi.
Per maggiori informazioni, vedere: Ridondanza CODESYS
Riconfigurazione – CANopen Manager
Con la funzione "Riconfigurazione" è possibile adattare dinamicamente una configurazione del bus CAN durante l'esecuzione dell'applicazione, inizialmente scaricata sul controller.
Con il blocco funzione DED.Reconfigure, disponibile quando è abilitata la diagnosi generica del dispositivo (Impostazioni PLC:), è possibile eseguire le seguenti azioni in fase di esecuzione.
Attivazione e disattivazione dei singoli dispositivi
Attivazione e disattivazione di un intero tratto di autobus
Suggerimento
Per maggiori informazioni sulla riconfigurazione a livello CANbus, vedere il capitolo Riconfigurazione – CANbus.
Comando: Cerca dispositivi
Finestra di dialogo: Scansione dispositivi
Nome del dispositivo, tipo di dispositivo, indirizzo, nome della stazione, ecc. | Dati sul dispositivo scansionato in base al tipo di rete. Quando si modifica un valore nell'elenco dei dispositivi scansionati, il valore viene visualizzato in corsivo. Ciò indica che il nuovo valore è stato modificato nell'editor in CODESYS, ma non nel dispositivo. Quando si scarica il valore sul dispositivo, questo viene visualizzato normalmente. I valori che indicano differenze tra il progetto e il dispositivo scansionato sono visualizzati in arancione. Se sono disponibili più descrizioni dispositivo per il dispositivo scansionato, il nome viene visualizzato in grassetto. La selezione della descrizione dispositivo corrispondente avviene in modo diverso a seconda del bus di campo. Per informazioni più dettagliate, consultare i capitoli sui bus di campo corrispondenti. Se non è possibile trovare una descrizione del dispositivo, viene visualizzato il seguente messaggio: "Attenzione! Il dispositivo non è stato trovato nel repository". A seconda del sistema bus, vengono visualizzate informazioni aggiuntive, come il numero del fornitore e il codice prodotto. Il dispositivo non può essere inserito nel progetto senza la descrizione del dispositivo installata. |
Mostra le differenze nel progetto |
|
Scansione per dispositivi | Avvia una nuova ricerca. |
Copia tutti i dispositivi nel progetto | Il dispositivo selezionato nella tabella viene inserito nell'albero dei dispositivi del progetto. Se non viene selezionato nulla, vengono visualizzati tutti i dispositivi scansionati. |


Importante
Se usi Copia tutti i dispositivi nel progetto per inserire i dispositivi disponibili nell'albero dei dispositivi nell'albero dei dispositivi, è necessario tenere presente quanto segue: i dati del Dati di processo E <...> Mappatura I/O le schede dei dispositivi esistenti potrebbero essere sovrascritte con i dati dei dispositivi inseriti di recente.
Questa parte della finestra di dialogo è visibile solo quando selezioni Mostra le differenze nel progetto opzione. Le differenze tra i dispositivi scansionati e quelli configurati sono contrassegnate da un codice colore. I dispositivi visualizzati in verde sono identici su entrambi i lati. I dispositivi visualizzati in rosso sono disponibili solo nella vista dei dispositivi scansionati o configurati. | |
 | Se è stato selezionato un dispositivo in entrambe le viste, i dispositivi scansionati vengono inseriti sopra il dispositivo configurato selezionato. |
 | Se è stato selezionato un dispositivo in entrambe le viste, i dispositivi scansionati vengono inseriti sotto il dispositivo configurato selezionato. |
 | Se è stato selezionato un dispositivo in entrambe le viste, i dispositivi configurati vengono sostituiti dal dispositivo scansionato selezionato. |
 | Tutti i dispositivi scansionati vengono copiati nel progetto. |
 | Elimina il dispositivo configurato selezionato. |
Comportamento del ciclo del bus per CANopenManager
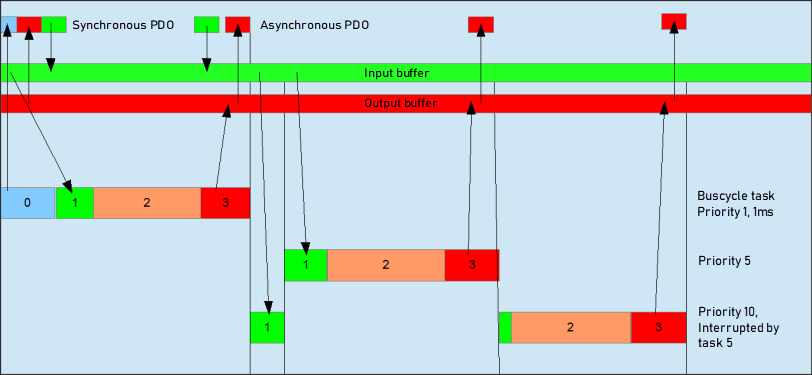
0: Invio/ricezione di PDO sincroni
1: Ricezione di PDO asincroni
2: compito IEC
3: Scrittura degli output nel buffer di output
Per maggiori informazioni, vedere: configurazione delle attività