Funzioni
Sicurezza CANopen
CANopen Safety è uno standard europeo (EN 50325-5). Ciò significa che i dati possono essere trasmessi tramite reti CAN che soddisfano i requisiti per le applicazioni SIL3. Questa trasmissione dati orientata alla sicurezza può avvenire parallelamente a una trasmissione dati CANopen esistente. CODESYS CANopen Safety supporta i requisiti di sicurezza secondo SIL2.
Oltre ai servizi CANopen convenzionali per la trasmissione dati, come SDO e PDO, per l'estensione di sicurezza è definito un servizio specifico per questa trasmissione dati con il servizio SRDO (Safety Related Data Object). Per quanto riguarda la configurazione e il tipo di comunicazione, è simile a un PDO, ma sono definite proprietà aggiuntive.
Per utilizzare CANopen Safety, il dispositivo CANopen SIL2 viene inserito nell'albero dei dispositivi al posto del dispositivo CANopen . Un dispositivo CANopen sicuro ha pagine specifiche sulla sicurezza Oltre alle consuete pagine di configurazione, è possibile configurare gli SRDO ( PDO sicuri). Oltre alle consuete istanze dei dispositivi non sicuri, per ogni dispositivo di sicurezza (dispositivo CANopen ) viene generata un'istanza aggiuntiva con prefisso "S_". Ciò fornisce funzionalità diagnostiche specifiche per la sicurezza.
L'utilizzo del dispositivo CANopen SIL2 richiede un runtime CODESYS SIL2 con un mini-driver CAN appositamente adattato e un plug-in CODESYS SIL2. Le librerie e i dispositivi necessari sono già inclusi nell'installazione standard.
Riconfigurazione – Dispositivo locale CANopen (Slave)
Con la funzione "Riconfigurazione" è possibile adattare dinamicamente una configurazione del bus CAN durante l'esecuzione dell'applicazione, inizialmente scaricata sul controller.
Con il blocco funzione DED.Reconfigure, disponibile quando è abilitata la diagnosi generica del dispositivo (Impostazioni PLC:), è possibile eseguire le seguenti azioni in fase di esecuzione.
Attivazione e disattivazione dei singoli dispositivi
Per maggiori informazioni, vedere: Riconfigurazione – CANbus
Comportamento del ciclo del bus per il dispositivo CANopen
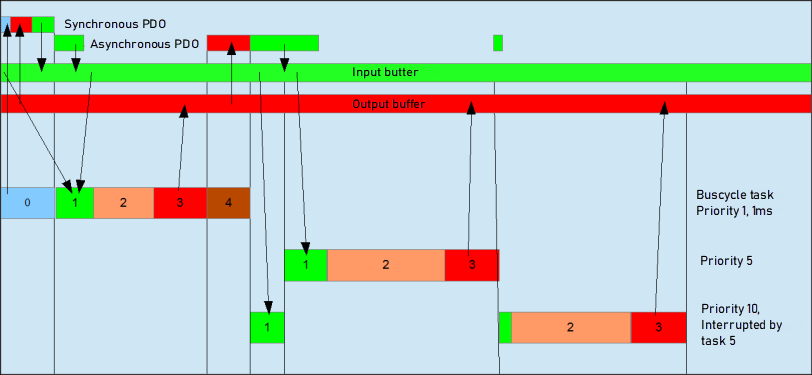
0: Invio/ricezione di PDO sincroni
1: Ricezione di PDO asincroni
2: compito IEC
3: Scrittura degli output nel buffer di output
4: Invio di PDO asincroni
Per maggiori informazioni, vedere: configurazione delle attività