Fonctions
Sécurité CANopen
CANopen Safety est une norme européenne (EN 50325-5). Cela signifie que les données peuvent être transmises via des réseaux CAN conformes aux exigences des applications SIL3. Cette transmission de données sécurisée peut s'effectuer en parallèle d'une transmission de données CANopen existante. CODESYS CANopen Safety répond aux exigences de sécurité selon le niveau SIL2.
Outre les services CANopen classiques de transmission de données tels que SDO et PDO, un service spécifique est défini pour l'extension de sécurité : le service SRDO (objet de données relatif à la sécurité). Sa configuration et son type de communication sont similaires à ceux d'un PDO, mais il comporte des propriétés supplémentaires.
Pour utiliser la sécurité CANopen , le périphérique CANopen SIL2 est inséré dans l'arborescence des périphériques à la place du périphérique CANopen . Un périphérique CANopen sécurisé possède pages spécifiques à la sécurité Outre les pages de configuration habituelles, les SRDOs ( PDOs de sécurité) peuvent y être configurés. En plus des instances de périphériques non sécurisés classiques, une instance supplémentaire préfixée « S_ » est générée pour chaque périphérique de sécurité (périphérique CANopen ). Ceci permet d'offrir des fonctionnalités de diagnostic spécifiques à la sécurité.
L'utilisation du périphérique CANopen SIL2 requiert un environnement d'exécution CODESYS SIL2 avec un mini-pilote CAN spécialement adapté et un module complémentaire CODESYS SIL2. Les bibliothèques et périphériques nécessaires sont déjà inclus dans l'installation standard.
Reconfiguration – Périphérique local CANopen (Esclave)
La fonction « Reconfiguration » permet d’adapter dynamiquement la configuration du bus CAN lors de l’exécution de l’application, configuration initialement téléchargée sur le contrôleur.
Avec le bloc fonctionnel DED.Reconfigure, qui est disponible lorsque le diagnostic générique du périphérique est activé (Paramètres de l'automate programmable :), vous pouvez exécuter les actions suivantes lors de l'exécution.
Activation et désactivation des appareils individuels
Pour plus d'informations, consultez : Reconfiguration – CANbus
Comportement du cycle de bus pour le périphérique CANopen
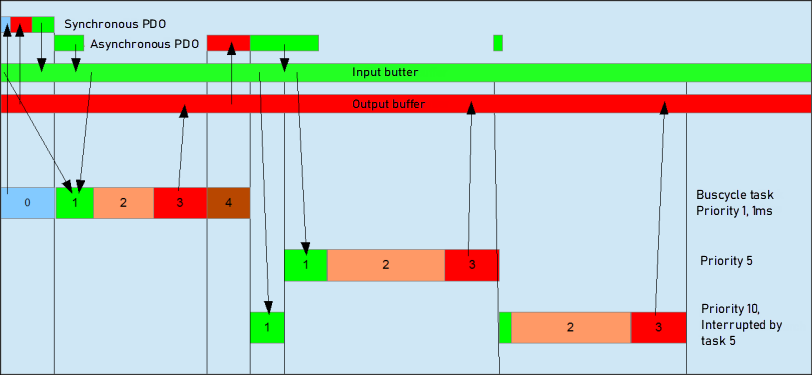
0 : Envoi/réception de PDOs synchrones
1 : Réception des PDOs asynchrones
2 : Tâche IEC
3 : Écriture des sorties dans le tampon de sortie
4 : Envoi de PDOs asynchrones
Pour plus d'informations, consultez : configuration des tâches