Ejes adicionales
Los ejes adicionales son ejes que forman parte del grupo de ejes pero no forman parte de la cinemática. Se pueden mover de forma sincrónica con el movimiento coordinado de la cinemática. Los ejes adicionales y los ejes de la cinemática comienzan a moverse y alcanzan su posición objetivo al mismo tiempo. Los movimientos de los ejes adicionales se amortiguan y se combinan con movimientos coordinados. Lo mismo se aplica a los movimientos puramente adicionales del eje, sin ningún movimiento de la cinemática
Diferencias en comparación con los movimientos de un solo eje
La principal diferencia en comparación con los movimientos de un solo eje que se controlan con bloques de funciones como MC_MoveAbsolute o MC_MoveRelative es la sincronización del movimiento. Si la sincronización no es importante, entonces podría tener sentido ordenar los ejes con bloques de funciones de un solo eje, ya que así los ejes podrían moverse más rápido. Otra diferencia es que los ejes adicionales se administran junto con el grupo de ejes. Están habilitados con SMC_GroupPower y los errores se pueden restablecer junto con MC_GroupReset. Debe tenerse en cuenta que un error en un solo eje de un eje adicional provocará un error en el grupo de ejes
Controlar movimientos de eje adicionales
Al ordenar movimientos de ejes adicionales, siempre puede elegir entre movimientos absolutos y relativos, independientemente de si el movimiento principal del grupo de ejes es absoluto o relativo. Por ejemplo, se puede ordenar un movimiento relativo adicional del eje de forma sincrónica con un MC_MoveLinearAbsolute comando.
Los movimientos adicionales del eje se ordenan mediante el AdditionalAxes entrada de los bloques de funciones de movimiento para el grupo de ejes. Por ejemplo, un movimiento PTP absoluto con un movimiento de eje relativo adicional se puede ordenar de la siguiente manera:
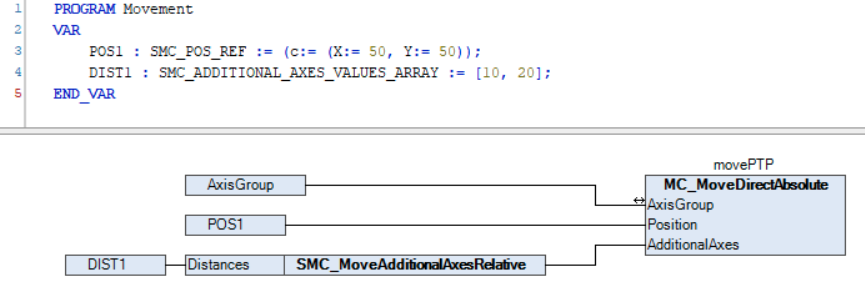
Si solo se deben mover los ejes adicionales, entonces un movimiento coordinado de longitud 0 (por ejemplo, MC_MoveDirectRelative con distancia 0) se puede controlar junto con un movimiento de eje adicional.
Notas
Los ejes de módulo también se admiten como ejes adicionales. Siempre se operan
shortestmodo para movimientos de eje adicionales absolutos.Para obtener más información, consulte lo siguiente: MC_DirectionMC_Direction
El número máximo de ejes adicionales está limitado por el parámetro de biblioteca.
MAX_NUM_ADDITIONAL_AXESdelSM3_CPKernelDefaultsbiblioteca. Este parámetro se puede cambiar en el administrador de la biblioteca.Para ver un ejemplo sobre cómo usar ejes adicionales, consulte lo siguiente: Uso de ejes adicionales en robótica