Uso de ejes adicionales en robótica
El Robotics_AdditionalAxes.project Un proyecto de ejemplo muestra cómo se configuran y utilizan ejes adicionales en robótica. Los ejes adicionales son ejes que se mueven sincrónicamente con los movimientos coordinados del robot
El proyecto se encuentra en el directorio de instalación de CODESYS debajo ..\CODESYS SoftMotion\Examples.
Estructura de la solicitud
El grupo de ejes está configurado en Axis Group objeto. Se utiliza un robot SCARA con 3 ejes (dos ejes giratorios y un eje Z lineal)
También se han agregado dos ejes adicionales a continuación Ejes adicionales y vinculado a los dos ejes DriveAdd1 y DriveAdd2.
El PLC_PRG el programa contiene una máquina de estados simple para el flujo del programa. Primero, el grupo de ejes está habilitado en estado 0, y luego un movimiento PTP a la posición (X=50, Y=50) lleva a cabo. Esto luego se mezcla en un movimiento lineal para posicionarse (X=50, Y=-50).
Para el primer movimiento del robot, un movimiento relativo adicional del eje con la distancia (10, 20) está comandado. Para el segundo movimiento del robot, la distancia del eje adicional es (-10, -20).
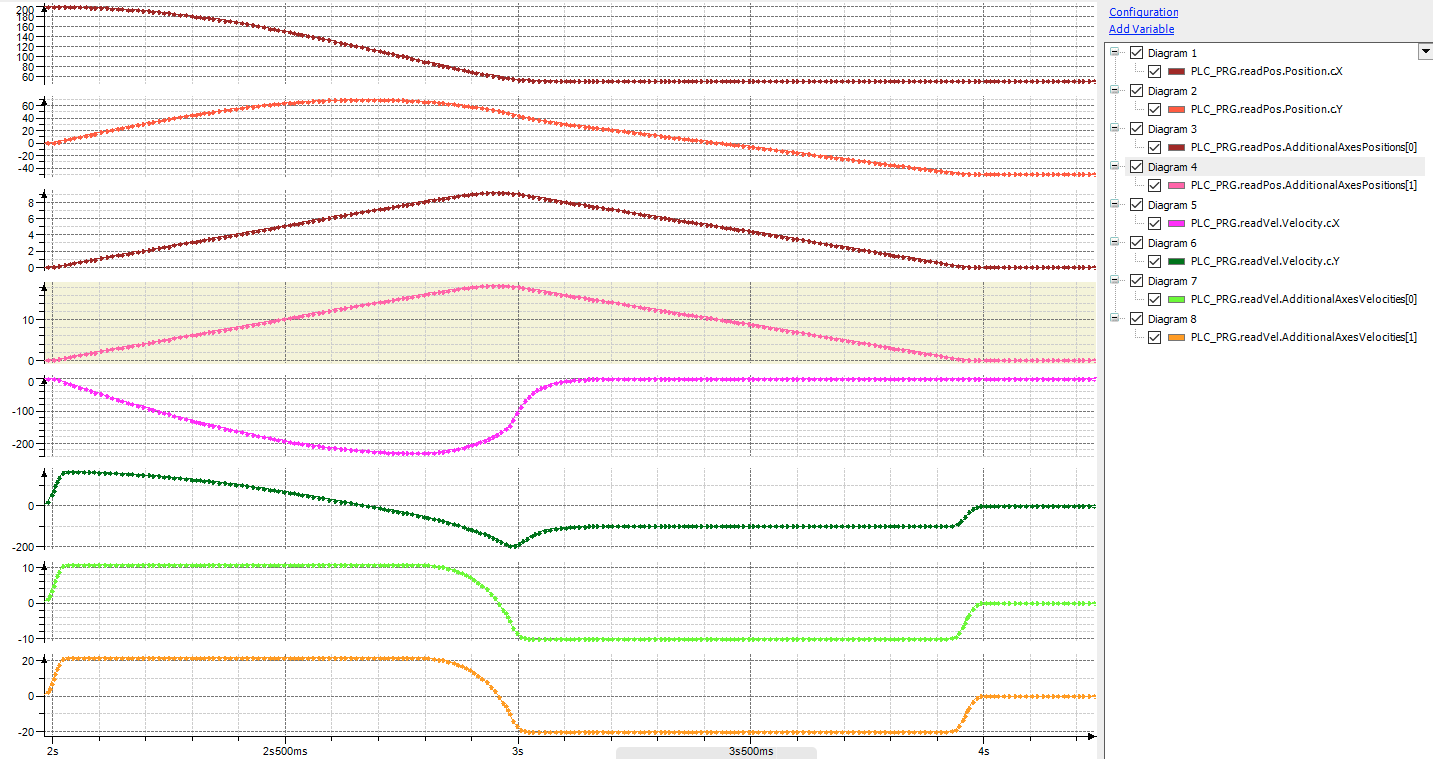
El MC_GroupReadActualPosition y MC_GroupReadActualVelocity los bloques de funciones se utilizan para leer la posición y la velocidad de la cinemática y de los ejes adicionales.
Puesta en servicio
Cree la aplicación y descárguela en un controlador.
Abra la traza y descárguela en el controlador.
Inicie la aplicación.
Puede rastrear el movimiento de las coordenadas X e Y y de los dos ejes adicionales de la traza.