Interpolación de orientación para movimientos CP
En el caso de movimientos de CP como MC_MoveLinearAbsolute, MC_MoveLinearRelative, MC_MoveCircularAbsolute, o MC_MoveCircularRelative, cualquier orientación de destino de la herramienta se puede especificar por medio de la posición de destino del movimiento. La consecuencia es que la orientación de la herramienta se convierte en la orientación del objetivo durante el movimiento de la trayectoria con la punta de la herramienta desplazándose por la trayectoria. Para la interpolación de orientación, no hace ninguna diferencia en qué sistema de coordenadas se dio la orientación del objetivo, ya sea en coordenadas de eje (ACS) o coordenadas de máquina (MCS).
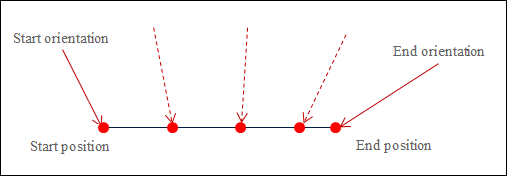
La siguiente imagen muestra una interpolación lineal con la interpolación de orientación simultánea. La flecha roja indica la dirección de la herramienta en los puntos inicial y final. La línea roja discontinua indica cómo se posiciona la herramienta en algunas ubicaciones durante la interpolación.
Los bloques de función mencionados anteriormente para los movimientos de trayectoria tienen la OrientationMode aporte. Esta entrada define cómo se pasa la orientación inicial a la orientación del objetivo.
Interpolación de gran círculo (
SMC_Orientation_Mode.GreatCircle)Ésta es una configuración predeterminada. Con esta configuración, la orientación inicial también se pasa a la orientación del objetivo en la distancia más corta. La distancia más corta significa que la herramienta se gira en la orientación del objetivo para minimizar el ángulo de recorrido de la rotación.
Interpolación de orientación del eje (
SMC_Orientation_Mode.Axis)
Considere un pórtico que tiene un eje C con un rango de valores de -360 ° a 360 °. La orientación inicial es C = 179 ° y la orientación del objetivo es C = -175 °. La interpolación del círculo máximo mueve el eje C del ángulo de Euler ZYZ (A, B, C) proporcionalmente a la distancia recorrida en la trayectoria desde 179 ° en la dirección positiva más allá de 180 ° hasta 185 °, que corresponde a -175 °. En este caso, recorre un ángulo total de 6 °.
Considere nuevamente el pórtico que tiene un eje C con un rango de valores de -180 ° a 180 °. La orientación inicial es C = 179 ° y la orientación del objetivo es C = -175 °. La interpolación del eje mueve el eje C del pórtico proporcionalmente a la distancia recorrida en la trayectoria desde 179 ° en la dirección negativa pasando de 0 ° a -175 °, recorriendo un ángulo total de 354 °. (Si se usó la interpolación de círculo máximo en este ejemplo, entonces se habría producido un error, porque se habría excedido el espacio de trabajo del eje C).
En la interpolación de círculo máximo, se puede predecir el cambio en la orientación de la herramienta. En la interpolación de ejes, es difícil predecir el cambio de orientación, porque los ejes de orientación pueden afectar la orientación de manera diferente según la posición. La interpolación de la orientación del eje comparte esta característica con los movimientos PTP. (Sin embargo, esto no significa que sea difícil predecir la ruta en el espacio para la interpolación de la orientación del eje. La ruta es la misma para ambos tipos de interpolación de orientación y el TCP siempre recorre el contorno definido exactamente).
Con la interpolación de círculo máximo, las singularidades en la cinemática de orientación no se pueden recorrer. Esto es posible fácilmente con la interpolación de ejes.
En la interpolación de círculo máximo pueden producirse violaciones de los límites de los ejes de orientación, como se menciona en el segundo ejemplo. Por lo tanto, al dar órdenes es necesario asegurarse de que no se violen los límites del eje al desplazarse hacia la orientación objetivo con la rotación más corta.
Con la interpolación de ejes, es posible girar más de 360°. Si un eje de orientación tiene un área de trabajo de más de 360°, entonces se puede desplazar, por ejemplo, a la posición 540°, en lugar de a la posición 180°. Esto corresponde a la misma orientación de la herramienta. Con la interpolación de círculo máximo, esto no es posible. El giro más corto hacia la orientación objetivo siempre corresponde a un ángulo total de como máximo 180°.
La interpolación de la orientación del eje requiere cinemática acoplada que consta de cinemática de posición y de herramienta. La parte de posición tiene que implementar la interfaz.
ISMPositionKinematics_Offset2.Si la cinemática no tiene ningún eje giratorio e implementan la interfaz
ISMPositionKinematics, luego el modo de orientación seleccionado (SMC_Orientation_Mode) se ignora.
Singularidades en la interpolación de orientación de ejes
Con la interpolación de la orientación del eje, se puede realizar un movimiento de trayectoria a través de las singularidades de la cinemática de orientación, lo que puede facilitar significativamente la programación. Las singularidades de la cinemática de posición cambian para este propósito.
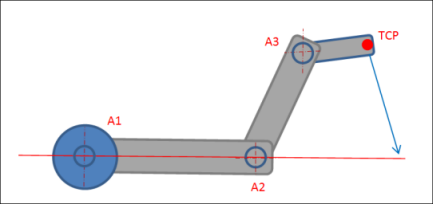
En el caso de una interpolación circular grande, Scara3_Z tiene una singularidad si el punto de ala (A3) está ubicado en la línea definida por la primera parte del brazo (si el segundo ángulo de articulación es 0 °).
Para la interpolación de la orientación del eje, las singularidades de la cinemática de posición cambian de modo que el TCP asume el papel que tiene el punto de brida (A3) de otra manera. Esta singularidad ocurre cuando el TCP (no el punto de la brida) se ubica en la línea definida por la primera parte del brazo. Al ordenar un movimiento con interpolación de orientación de eje, se comprueba si esta singularidad modificada se encuentra o no entre las posiciones inicial y objetivo del movimiento. Si es así, el movimiento no se acepta y se emite un error.
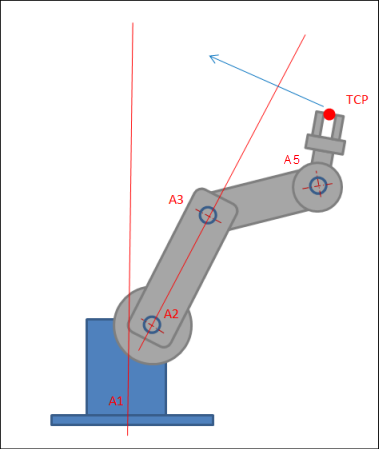
Para los robots de brazo articulado de 6 ejes, la situación es comparable a Scara3_Z, pero son posibles dos singularidades. La primera ocurre cuando el TCP se encuentra en la línea que pasa por A2 y A3. El segundo ocurre cuando el TCP se encuentra en la línea que pasa por A1. El mando también comprueba aquí que no se transita ninguna singularidad.
Sugerencia
Puede suceder que la configuración de Scara3 (o el robot de brazo articulado de 6 ejes) cambie al viajar con interpolación de orientación de ejes. Sin embargo, al final del movimiento siempre se aplica la misma configuración que tenía el robot en el punto de partida.