Sistema de control redundante
Puede aumentar la confiabilidad de su sistema de control protegiendo su controlador activo (PLC) con un PLC redundante.
El PLC redundante puede hacerse cargo de la ejecución de la aplicación en cualquier momento durante el tiempo de ejecución. Las funciones de los PLC activos y en espera se pueden cambiar dinámicamente entre los dos controladores. Esto permite evitar fallos en el sistema o reducir significativamente su impacto. Los sistemas de control redundantes aumentan la confiabilidad, la disponibilidad y la continuidad operativa de las plantas industriales críticas o incluso de las máquinas más pequeñas
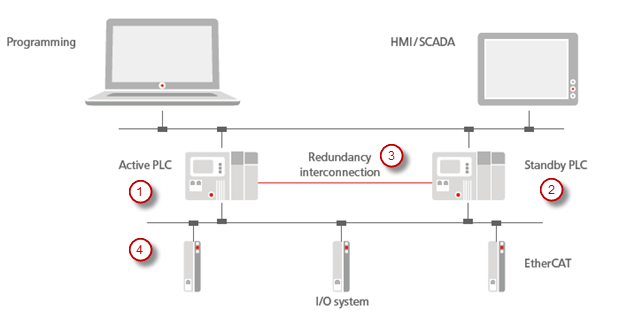
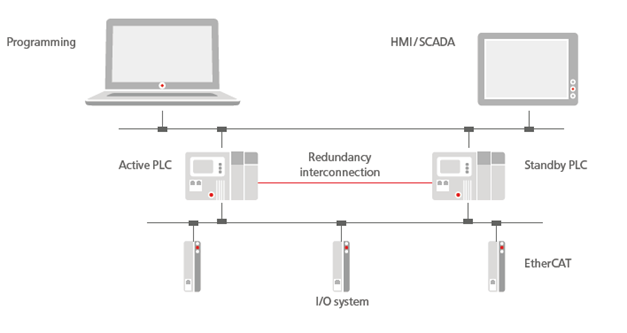
La figura muestra un escenario de automatización que consiste en el entorno de desarrollo, el sistema de control redundante de dos PLC y un entorno de máquina conectado mediante buses de campo. La aplicación se ejecuta en paralelo en dos PLC: un PLC funciona activamente (1) y el otro PLC está en modo de espera (2). El PLC en modo de espera también lee las entradas del sistema de bus de campo conectado (EtherCAT en el ejemplo) y se sincroniza continuamente con el PLC activo a través del enlace de redundancia (3). Esto permite que el PLC en espera se active inmediatamente en caso de avería y tome el control de los buses de campo (
El enlace de redundancia (3) usa TCP o UDP de forma predeterminada. Sin embargo, la comunicación también se puede proporcionar a través de un componente de comunicación específico del fabricante.
Además, las visualizaciones se pueden conectar a un sistema de control redundante cuando se ejecutan como CODESYS WebVisu en un navegador. Los clientes de visualización seguirán funcionando casi sin interrupciones en caso de que se produzca un cambio.
Aviso

El vídeo pretende ofrecer una visión general de esta función. La gama de funciones de CODESYS Redundancy Configuration como se ha visto, puede diferir de la gama actual de funciones.

Principios básicos de funcionalidad
El desarrollador de la aplicación descarga primero la aplicación en el primer PLC y crea allí la aplicación de arranque. Al arrancar, el segundo PLC se sincroniza con este controlador y también ejecuta la aplicación de arranque.
Una vez descargada e inicializada la aplicación de arranque, el PLC está listo para ejecutar el primer ciclo de tareas. A continuación, todas las áreas de memoria registradas (todos los datos IEC) se transfieren al segundo PLC. A partir de este momento, la redundancia está activa y ambos PLC ejecutan la tarea de la aplicación de forma sincronizada. La ejecución de la tarea se sincroniza mediante mensajes que se intercambian a través del enlace redundante antes y después de cada tarea IEC.
No hay ningún PLC activo fijo o preferido. El modo de funcionamiento viene determinado por la secuencia de arranque: el PLC que se inicia primero envía un mensaje al otro PLC a través del enlace de redundancia. Si no se recibe ninguna respuesta, el PLC iniciado sigue cargando la aplicación de arranque y funciona en modo autónomo.
Si el PLC en espera no recibe un mensaje del PLC activo en el plazo configurado, dará por hecho que el PLC activo ha dejado de funcionar correctamente y pasará al modo autónomo. Tomará el control de las E/S del bus de campo. Por el contrario, el PLC activo también pasa al modo autónomo si no recibe mensajes del PLC en espera.
Si se sustituye y se reinicia el primer PLC, se sincroniza con el otro PLC que se encuentra actualmente en modo autónomo, tal como se ha descrito anteriormente, y por lo tanto pasa al modo de espera.
Un PLC en espera puede pasar al modo de simulación. Durante ese tiempo, la función de redundancia queda desactivada. La conexión al bus de campo también permanece desactivada (al igual que en el modo de espera). El PLC activo pasa al modo autónomo durante este tiempo. El modo de simulación puede finalizar mediante una resincronización o un reinicio. El controlador que funciona en modo de simulación vuelve entonces al modo de espera, siempre que no se produzcan errores durante la sincronización o el reinicio.
Si se producen errores durante la actualización de la aplicación de arranque, durante la transferencia de las áreas de memoria registradas o durante el ciclo de redundancia, el PLC pasa al modo de error. A continuación, es necesario realizar una resincronización o un reinicio.
Interfaz de usuario
Complemento: CODESYS Redundancy Configuration
Pestaña: Estado de redundancia
En tiempo de ejecución, CODESYS supervisa el sistema de redundancia y muestra allí sus estados actuales. Allí también puede acceder a los comandos de redundancia más importantes y, por ejemplo, ordenar una conmutación entre
Pestaña: Configuración de redundancia
Aquí puede configurar los ajustes de comunicación del enlace de redundancia y definir la tarea correspondiente y un organismo de control.
Pestaña: General
Pestaña: Visualización
Aquí puede configurar un enlace de redundancia entre los servidores web, cada uno de los cuales se ejecuta en un PLC. Como resultado, puede conectar las visualizaciones, que se ejecutan CODESYS WebVisu en un navegador, con el sistema de control redundante.
Pestaña: Áreas Registradas
Aquí puede administrar los datos y las áreas que deben sincronizarse en tiempo de ejecución.
Pestaña: Tronco
Enumera los eventos de redundancia históricos del registrador del PLC
EtherCAT (CODESYS GmbH Apilar)
PROFINET
CANopen
El bus de campo se configura en Configuración de redundancia objeto en el General pestaña del Configuración de redundancia pestaña.
Para más información, ver: General
Biblioteca: Redundancy
La biblioteca Redundancy Implementation, de la biblioteca Redundancy se ajusta, suministra componentes como SwitchToActive o SwitchToStandby, para que pueda acceder al componente de redundancia mediante programación. Por ejemplo, puede cambiar los controladores al modo activo con SwitchToActive programa.
Biblioteca: VisuRedundancy
La biblioteca VisuRedundancy implementa la conexión de redundancia para la visualización y proporciona módulos de funciones para monitorear las actividades, por ejemplo.
Sistema de tiempo de ejecución
Instalación
El sistema de ejecución proporciona dos componentes principales para el funcionamiento redundante de un sistema de control:
Para operar redundantemente un sistema de control, el
CmpRedundancycomponente de redundancia, así como un componente adicional, que opera el enlace de redundancia, están disponibles en el sistema de tiempo de ejecución de los PLC. Este componente adicional es específico del dispositivo, pero lo habitual es un enlace IP:CmpRedundancyConnectionIP.Este componente gestiona todas las funciones para administrar las operaciones de redundancia, incluida la distribución de funciones (activas/en espera), la sincronización de datos y la supervisión de los estados de comunicación.
Componente para el enlace de redundancia
Este componente es específico del dispositivo y establece la conexión física y lógica entre los dos controladores. La mayoría de los dispositivos utilizan una conexión basada en IP, que se
CmpRedundancyConnectionIPcomponente.
Funcionalidad
Vincula dos PLC a un sistema redundante
Sincroniza los datos de redundancia
Conmuta los estados operativos de los PLC
Registra los eventos de redundancia en el registrador
Nota
Los eventos que ocurren durante el tiempo de ejecución son registrados en ambos dispositivos por los registradores de los sistemas de tiempo de ejecución.
El archivo de configuración *.cfg para el tiempo de ejecución de un CODESYS Control Win se almacena en ProgramData.
[CmpRedundancyConnectionIP] Link1.IpAddressLocal=192.168.56.1 ; IP address of redundancy link of local PLC Link1.IpAddressPeer=192.168.56.101 ; IP address of redundancy link of peer PLC Link1.Port=1205 [CmpRedundancy] BootupWaitTime=5000 TcpWaitTime=2000 StandbyWaitTime=50 ; This timeout depends on the quality of real time task and communication system LockTimeout=20 ; Maximum time of timer lock Bootproject=Application ; Name of your CODESYS application RedundancyTaskName=MainTask ; Task name in your CODESYS application PlcIdent=1 ; PlcIdent=2 on other PLC
Aplicación de arranque
La aplicación de arranque se almacena de forma idéntica en ambos PLC. Cuando desee actualizar la aplicación de arranque, basta con descargarla en el PLC activo.
Para realizar una actualización, basta con cargar la nueva aplicación de arranque en el controlador activo. La controladora en espera recibe la versión actualizada automáticamente durante la sincronización.