Funciones
Seguridad CANopen
CANopen Safety se ha publicado como estándar europeo (EN 50325-5). Esto significa que los datos pueden transmitirse a través de redes CAN que cumplen los requisitos para aplicaciones SIL3. Esta transmisión de datos orientada a la seguridad puede realizarse en paralelo a una transmisión de datos CANopen existente. CODESYS CANopen Safety cumple con los requisitos de seguridad según SIL2.
Además de los servicios CANopen convencionales para la transmisión de datos, como SDO y PDO, se define un servicio especial para la extensión de seguridad mediante el servicio SRDO (objeto de datos relacionado con la seguridad). En cuanto a la configuración y el tipo de comunicación, es similar a un PDO, pero se definen propiedades adicionales.
Para utilizar CANopen Safety, se inserta el Administrador CANopen SIL2 en el árbol de dispositivos en lugar del Administrador CANopen . Tanto los dispositivos seguros (icono de dispositivo amarillo) como los no seguros (icono de dispositivo gris) se pueden insertar debajo de este administrador. Como resultado, los suscriptores CAN seguros e inseguros pueden operar en paralelo. Los suscriptores seguros tienen páginas específicas de seguridad, además de las páginas de configuración habituales. En estas páginas se pueden configurar los SRDOs ( PDO (Process Data Objects) seguros), así como sus CRC. Además de las instancias habituales de dispositivos no seguros, se genera una instancia adicional con el prefijo "S_" para cada dispositivo de seguridad (Administrador CANopen y esclavos). Esto proporciona capacidades de diagnóstico específicas de seguridad.
El uso de CANopen Manager SIL2 requiere un entorno de ejecución SIL2 de CODESYS con un minicontrolador CAN especialmente adaptado y un complemento CODESYS SIL2. Las bibliotecas y dispositivos necesarios ya están incluidos en la instalación estándar.
Redundancia
Con el CODESYS Kit de herramientas de redundancia: se pueden utilizar dos administradores CANopen en una configuración de redundancia. En este caso, el controlador pasivo supervisa las actividades del controlador activo y asume la función activa cuando se detecta un fallo de comunicación. La supervisión se realiza mediante dos mecanismos paralelos:
Monitoreo de la CODESYS Kit de herramientas de redundancia (principalmente a través de Ethernet)
Monitoreo del latido del Administrador CANopen . El tiempo de espera deseado se configura en el configurador del Administrador CANopen .
Sugerencia
El "CODESYS Se requiere el complemento "Redundancy Toolkit" para la función "Redundancia". Además, debe configurar la redundancia en el árbol de dispositivos.
Para obtener más información, consulte: Redundancia de CODESYS
Reconfiguración – Administrador CANopen
Con la función "Reconfiguración" es posible adaptar dinámicamente durante la ejecución de la aplicación una configuración de bus CAN que se descargó inicialmente en el controlador.
Con el bloque de función DED.Reconfigure, que está disponible cuando el diagnóstico de dispositivo genérico está habilitado (Configuración del PLC:), puede ejecutar las siguientes acciones en tiempo de ejecución.
Activación y desactivación de dispositivos individuales
Activación y desactivación de todo un tramo de bus
Sugerencia
Para obtener más información sobre la reconfiguración a nivel de CANbus, consulte el capítulo Reconfiguración – CANbus.
Comando: Buscar dispositivos
Diálogo: Escanear dispositivos
Nombre del dispositivo, tipo de dispositivo, dirección, nombre de la estación, etc. | Datos sobre el dispositivo escaneado según el tipo de red. Al cambiar un valor en la lista de dispositivos escaneados, este se muestra en cursiva. Esto indica que el nuevo valor se ha modificado en el editor. CODESYS, pero no en el dispositivo. Al descargar el valor al dispositivo, se muestra normalmente. Los valores que indican diferencias entre el proyecto y el dispositivo escaneado se muestran en naranja. Si hay varias descripciones disponibles para el dispositivo escaneado, el nombre se muestra en negrita. La selección de la descripción correspondiente se resuelve de forma diferente para cada bus de campo. Para obtener información más detallada, consulte los capítulos correspondientes sobre buses de campo. Si no se encuentra la descripción del dispositivo, se mostrará el siguiente mensaje: "¡Atención! El dispositivo no se encontró en el repositorio". Según el sistema de bus, se mostrará información adicional, como el número de proveedor y el número de producto. El dispositivo no se puede insertar en el proyecto sin la descripción del dispositivo instalado. |
Mostrar diferencias al proyecto |
|
Buscar dispositivos | Inicia una nueva búsqueda. |
Copiar todos los dispositivos al proyecto | El dispositivo seleccionado en la tabla se inserta en el árbol de dispositivos del proyecto. Si no se selecciona nada, se muestran todos los dispositivos escaneados. |


Importante
Si utilizas Copiar todos los dispositivos al proyecto Para insertar dispositivos que están disponibles en el árbol de dispositivos, se debe tener en cuenta lo siguiente: Los datos del árbol de dispositivos Datos de proceso y <...> Mapeo de E/S Las pestañas de los dispositivos existentes se pueden sobrescribir con los datos de los dispositivos insertados recientemente.
Esta parte del cuadro de diálogo solo es visible cuando seleccionas el Mostrar diferencias al proyecto opción. Las diferencias entre los dispositivos escaneados y configurados están codificadas por colores. Los dispositivos en verde son idénticos en ambos lados. Los dispositivos en rojo solo están disponibles en la vista de los dispositivos escaneados o configurados. | |
 | Si ha seleccionado un dispositivo en ambas vistas, los dispositivos escaneados se insertarán encima del dispositivo configurado seleccionado. |
 | Si ha seleccionado un dispositivo en ambas vistas, los dispositivos escaneados se insertan debajo del dispositivo configurado seleccionado. |
 | Si ha seleccionado un dispositivo en ambas vistas, los dispositivos configurados se reemplazarán por el dispositivo escaneado seleccionado. |
 | Todos los dispositivos escaneados se copian al proyecto. |
 | Elimina el dispositivo configurado seleccionado. |
Comportamiento del ciclo de bus para CANopenManager
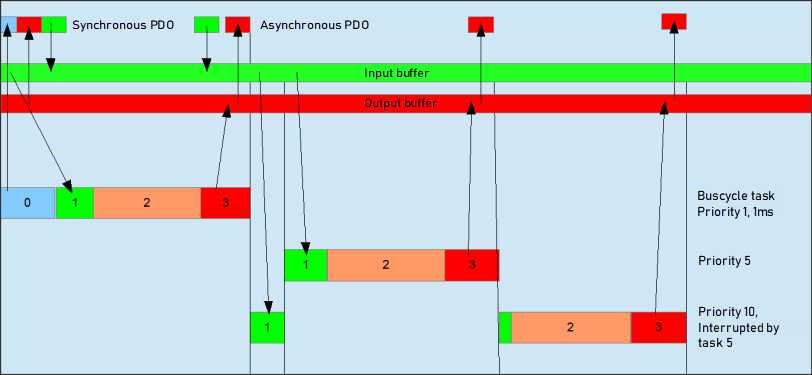
0: Envío/recepción de PDO (Process Data Objects) síncronos
1: Recepción de PDO (Process Data Objects) asincrónicos
2: Tarea IEC
3: Escritura de las salidas en el búfer de salida
Para obtener más información, consulte: configuración de tareas