Funciones
Seguridad CANopen
CANopen Safety se ha publicado como estándar europeo (EN 50325-5). Esto significa que los datos pueden transmitirse a través de redes CAN que cumplen los requisitos para aplicaciones SIL3. Esta transmisión de datos orientada a la seguridad puede realizarse en paralelo a una transmisión de datos CANopen existente. CODESYS CANopen Safety cumple con los requisitos de seguridad según SIL2.
Además de los servicios CANopen convencionales para la transmisión de datos, como SDO y PDO, se define un servicio especial para la extensión de seguridad mediante el servicio SRDO (objeto de datos relacionado con la seguridad). En cuanto a la configuración y el tipo de comunicación, es similar a un PDO, pero se definen propiedades adicionales.
Para utilizar la seguridad CANopen , se inserta el dispositivo CANopen SIL2 en el árbol de dispositivos en lugar del dispositivo CANopen . Un dispositivo CANopen seguro tiene páginas específicas de seguridad Además de las páginas de configuración habituales, se pueden configurar los SRDOs ( PDO (Process Data Objects) seguros). Además de las instancias habituales de dispositivos no seguros, se genera una instancia adicional con el prefijo "S_" para cada dispositivo de seguridad (dispositivo CANopen ). Esto proporciona funciones de diagnóstico específicas para la seguridad.
El uso del dispositivo CANopen SIL2 requiere un entorno de ejecución CODESYS SIL2 con un minicontrolador CAN especialmente adaptado y un complemento CODESYS SIL2. Las bibliotecas y dispositivos necesarios ya están incluidos en la instalación estándar.
Reconfiguración – Dispositivo local CANopen (Esclavo)
Con la función "Reconfiguración" es posible adaptar dinámicamente durante la ejecución de la aplicación una configuración de bus CAN que se descargó inicialmente en el controlador.
Con el bloque de función DED.Reconfigure, que está disponible cuando el diagnóstico de dispositivo genérico está habilitado (Configuración del PLC:), puede ejecutar las siguientes acciones en tiempo de ejecución.
Activación y desactivación de dispositivos individuales
Para obtener más información, consulte: Reconfiguración – CANbus
Comportamiento del ciclo de bus para el dispositivo CANopen
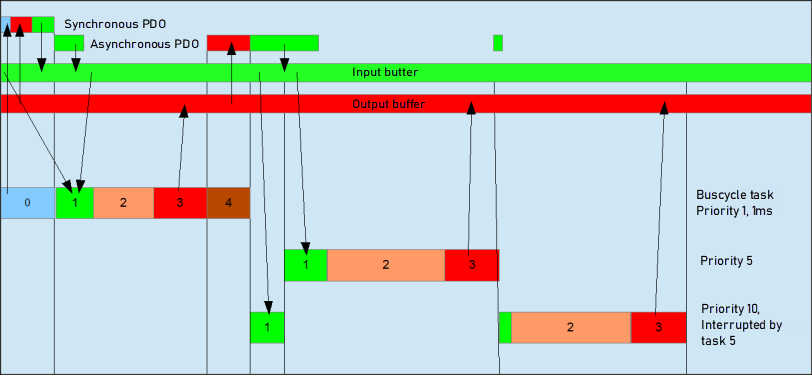
0: Envío/recepción de PDO (Process Data Objects) síncronos
1: Recepción de PDO (Process Data Objects) asincrónicos
2: Tarea IEC
3: Escritura de las salidas en el búfer de salida
4: Envío de PDO (Process Data Objects) asincrónicos
Para obtener más información, consulte: configuración de tareas