General
Important
No other fieldbus or additional network traffic may be operated on this interface. Use a dedicated network card for EtherCAT, otherwise real-time capability cannot be guaranteed.
The configuration of EtherCAT modules is based on the device description files for the used master and slave devices and can be adapted in the project in configuration dialogs. In order to make sure that the simplest and most error-free use possible, we recommend for standard applications that you enable the option for the Automatic Configuration of the master so that the majority of the configuration settings are done automatically.
Requirements
The Npcap driver is required when using EtherCAT devices with a CODESYS Control Win SL. The Npcap software is included in the Wireshark setup, for example. After installing the driver or inserting a USB network adapter, Windows needs to be restarted so that the adapters can be selected.
Important
This note is valid only for CODESYS versions through SP18.
Install the WinPCap software.
By default, Npcap is also installed with the Wireshark installation. You need to disable this option in the Wireshark setup because Npcap must not be installed on the system.
When using CODESYS Control RTE SL, WinPCap or Npcap is not required. You need to replace the default network driver in the Windows Device Manager with a special CODESYS driver.
For details, see the help for the CODESYS Control RTE SL runtime system under Available Dynamic Components or Drivers.
You also need to enable the applicable runtime components in the file CODESYSControl_User.cfg:
Component.<subsequent number> = CmpEt100DrvAvailable for Intel Pro 100
Component.<subsequent number> = CmpEt1000DrvAvailable for Intel Pro 1000
Component.<subsequent number> = CmpRTL81x9MpdAvailable for RTL8139
Component.<subsequent number> = CmpRTL8169MpdAvailable for Realtek RTL8169 or RTL8168 (PCIe version)
Tip
You can also enable the runtime components in the configuration dialog of the CODESYS Control RTE SL.
For more information, see the following: CODESYS Control RTE SL V3
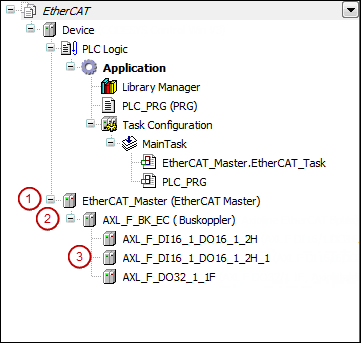
EtherCAT Device Tree



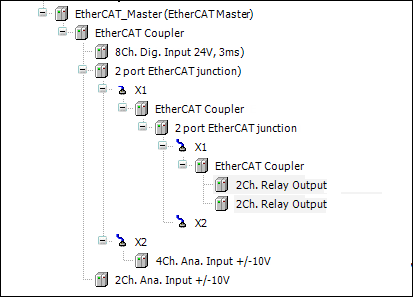
EtherCAT Topology
In addition to the line and tree topology, CODESYS also supports the EtherCAT star topology. Special EtherCAT branches (a 2-port EtherCAT junction in the example) are required for the configuration of an EtherCAT star topology. A modular EtherCAT star can be created by using of multiple branches. As a result, individual devices or complete EtherCAT lines can be connected with the branches. An EtherCAT branch is identified by the  symbol.
symbol.
Optional devices
The Optional devices function can be used for variable hardware configurations. At the start of the stack, the system checks whether optional devices are available. If the devices are not found, then they are deactivated automatically. However, the devices can also be activated at a later date if, for example, it is a device at the end of the network line. On the other hand, if the Automatically restart slaves option is selected, then the activated devices are automatically switched to "operational", thereby activating the process data.
Tip
The bus cycle task is set in the general PLC settings.
Access to the EtherCAT configuration by the application takes place via instances of the EtherCAT Master and the EtherCAT Slaves. When the EtherCAT Master or the EtherCAT Slaves are inserted as objects into a project, instances are created automatically for the master and slaves which can be addressed in the application program. For example, a restart, a stop, or a status check of the EtherCAT device can be performed from the application.
The library IODrvEtherCAT provides function blocks for reading and writing individual parameters, even during bus operation.
