Kin_Polar (FB)¶
- FUNCTION_BLOCK Kin_Polar IMPLEMENTS ISMPositionKinematicsInternal,
Transformationsbaustein für polare Kinematik.
Ein Polarsystem besteht aus einer Abstands- und einer Richtungsachse.
Maschinenkoordinatensystem (MCS) |
|
|---|---|
Ursprung |
Die Position des TCP, wenn der Positionswert der linearen Achse (a1) 0 ist.. |
X |
Die X-Achse ist so definiert, dass eine positive Geschwindigkeit der Linearachse (a1), während die Rotationsachse (a0) bei 0° ist, zu einer Bewegung rein entlang der X-Achse in positiver Richtung führt. |
Y |
Die Y-Achse ist so definiert, dass eine positive Geschwindigkeit der Linearachse (a1), während die Rotationsachse (a0) bei 90° ist, zu einer Bewegung rein entlang der Y-Achse in positiver Richtung führt. |
Die Lage des Werkzeugkoordinatensystems (TCS) relativ zum MCS in der Nullposition:
Werkzeugkoordinatensystem (TCS) |
|
|---|---|
Ursprung |
Relativ zum MCS: dX = 0 dY = 0 dZ = 0 |
X |
Entlang der X-Achse des MCS in positiver Richtung |
Y |
Entlang der Y-Achse des MCS in positiver Richtung |
Z |
Entlang der Z-Achse des MCS in positiver Richtung |
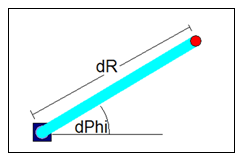
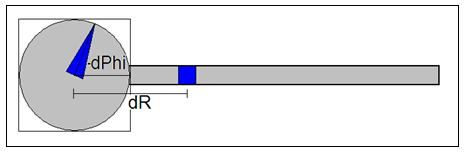
Die Werte der einzelnen Achsen haben folgende Bedeutung:
a0 |
Position der Drehachse um Z in Grad. Im Abschnitt „Zuordnung zu den Achsen“ als „C“ bezeichnet. |
a1 |
Position der Linearachse in der Richtung der X-Achse (>=0). Im Abschnitt „Zuordnung zu den Achsen“ als „R“ bezeichnet. |
Bemerkung
Diese Positionskinematik unterstützt nicht den Orientierungsmodus „Axis“ für CP-Bewegungen.
Wenn diese Kinematik ohne Orientierungskinematik verwendet wird, dann ist sie nicht kompatibel mit Werkzeugen (siehe SMC_GroupSetTool), die einen Positionsoffset in eine andere Richtung als die Z-Richtung haben.
- Attribute:
sm_kin_libdoc
Properties:
Methods:
Structure: