MC_GroupStop (FB)¶
FUNCTION_BLOCK FINAL MC_GroupStop
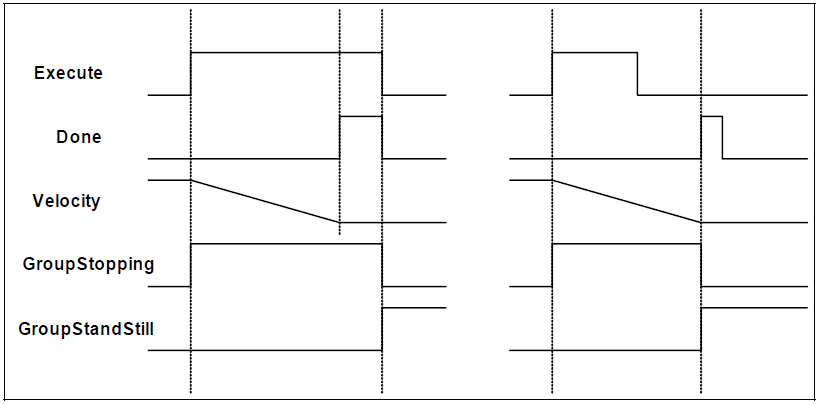
Der Funktionsbaustein führt einen kontrollierten Bewegungsstopp aus und transferiert die Achsgruppe in den Zustand GroupStopping.
Er bricht jedes andere Bewegungskommando ab. Während die Achsgruppe im Zustand GroupStopping ist, kann kein anderer FB eine Bewegung auf dieser Achsgruppe ausführen. Nachdem die Achsgruppe den Zustand standstill erreicht hat, wird der Ausgang Done sofort auf TRUE gesetzt. Die Achsgruppe bleibt so lange im Zustand GroupStopping wie Execute TRUE ist, oder die Achsen noch nicht im Zustand standstill sind. Sobald Done gesetzt ist und Execute FALSE ist, geht die Achsgruppe in den Zustand GroupStandBy. Der Befehl kann nur durch MC_Power abgebrochen werden.
Bemerkung
Die effektiven Grenzen für Verzögerung und Ruck werden durch die Eingänge``Deceleration``, Jerk, AccFactor und JerkFactor bestimmt. Diese Grenzen können überschritten werden um auf der kommandierten Bahn zu bleiben.
Bemerkung
Im Gegensatz zu MC_GroupHalt werden die angegebenen dynamischen Grenzen weder durch einen Override beeinflusst, der mit MC_GroupSetOverride gesetzt wird noch durch Achsbegrenzungsfaktoren, die mit SMC_GroupSetAxisLimitFactors gesetzt werden, noch durch zusätzliche Grenzen, die mit SMC_GroupSetAncillaryPathLimits und SMC_GroupSetAncillaryAxisLimits gesetzt werden.
Für das Anhalten von Punkt-zu-Punkt-Bewegungen gilt: Geschwindigkeit/Beschleunigung/Verzögerung/Ruck der Achsen sind Eigenschaften der Achsen und werden nicht in diesem Funktionsbaustein festgelegt. Siehe auch die Eingänge
AccFactorundJerkFactor.SMC_GroupSaveContinueData und MC_GroupContinue können verwendet werden, um nach einem Stopp auf der ursprünglichen Bahn weiterzufahren, wenn
ClearMovementsauf FALSE gesetzt ist. Die erste Bewegung nach einem MC_GroupStop überschreibt den Zustand der Achsgruppe, so dass SMC_GroupSaveContinueData aufgerufen werden muss, bevor eine neue Bewegung kommandiert wirdWenn
ClearMovementsauf FALSE gesetzt ist und es irgendwelche Bewegungen in einem dynamischen Koordinatensystem gibt (siehe MC_TrackConveyorBelt, MC_TrackRotaryTable, MC_SetDynCoordTransform, oder SMC_SetDynCoordTransformEx), die noch nichtDonesind, wenn MC_GroupStop ausgeführt wird, bleiben die KoordinatensystemeInUse, auch nachdem MC_GroupStopDoneist.
- Ein-/Ausgang:
Gültigkeitsbereich
Name
Typ
Initialwert
Kommentar
Inout
AxisGroupReferenz auf eine Achsgruppe
Eingang
ExecuteBOOLSteigende Flanke: Der Vorgang startet.
DecelerationLREALBetrag der Verzögerung [u/s²]. Wird nur verwendet, wenn eine Continuous-Path-Bewegung angehalten wird.
JerkLREALBetrag der Verzögerung [u/s²]. Wird nur verwendet, wenn eine Continuous-Path-Bewegung angehalten wird.
AccFactorLREAL1
Die maximale Verzögerung jeder Achse wird mit diesem Faktor multipliziert. Der Faktor muss im Bereich ]0, 1] liegen.
JerkFactorLREAL1
Der maximale Ruck jeder Achse wird mit diesem Faktor multipliziert. Der Faktor muss im Bereich ]0, 1] liegen.
TorqueFactorLREAL1
Die maximale Drehmoment jeder Achse wird mit diesem Faktor multipliziert. Der Faktor muss im Bereich ]0, 1] liegen. Damit sich dieser Faktor auswirkt, muss ein dynamisches Modell mit SMC_GroupSetDynamics erstellt worden sein.
ClearMovementsBOOLTRUE
Wenn auf TRUE gesetzt, werden alle vor MC_GroupStop kommandierten Bewegungen gelöscht, nachdem die Achsgruppe den Stillstand erreicht hat. Um mit SMC_GroupSaveContinueData und MC_GroupContinue die vorhergehenden Bewegungen aus der Halteposition fortsetzen zu können, muss
ClearMovementsauf FALSE gesetzt werden.NameSTRING‚MC_GroupStop‘
Der Name der Bewegung.
Ausgang
DoneBOOLStillstand wurde erreicht
BusyBOOLDer Funktionsbaustein ist nicht beendet
ActiveBOOLZeigt an, dass der FB die Achse steuert
CommandAbortedBOOLDer Befehl wird abgebrochen, indem MC-Power von einer oder mehreren Achsen der Gruppe deaktiviert wird. Der Status wechselt zu
GroupDisabled.CommandAcceptedBOOLDer Befehl wurde von der Achsgruppe angenommen. Wenn der Ausgang
TRUEwird, kann die Funktionsbausteininstanz dazu benutzt werden, die nächste Bewegung mit einer neuen steigenden Flanke anExecutezu kommandieren. Solange der AusgangFALSEist, wird der Funktionsbaustein ohne neue steigende Flanke vonExecuteweiter ausgeführt. Der Ausgang wird bei einer fallenden Flanke vonExecuteaufFALSEzurückgesetzt.ErrorBOOLZeigt an, dass im Funktionsbaustein ein Fehler aufgetreten ist
ErrorIDSMC_ERRORFehlererkennung
MovementIdSMC_Movement_IdEindeutige Identifikationsnummer der Bewegung. Gültig, wenn
CommandAcceptedoderDoneTRUEsind.