6轴关节机器人
具有六个旋转轴和六个自由度 (DoF) 的关节臂机器人的改造。机器人手臂的三个定向轴相交于一点:关节中心。
这 SMC_Trafo_ArticulatedRobot_6DOF 和 SMC_TrafoF_ArticulatedRobot_6DOF 功能块实现了具有六个旋转轴的关节臂机器人的正向和反向转换。在图像中,笛卡尔坐标系在下方标记为 0 轴。z 轴指向下方,x 轴指向工具中心点 (TCP) 的方向。笛卡尔坐标系的原点是交叉轴 0 和机器人底部。
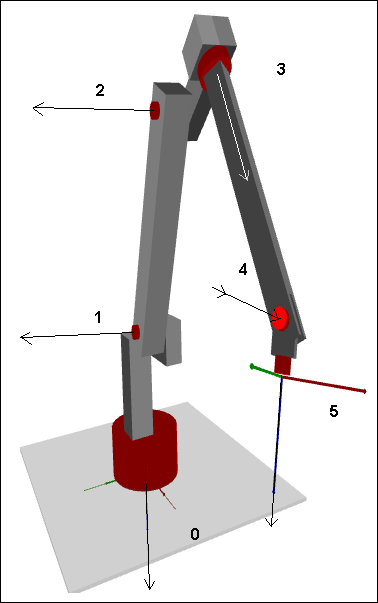
轴的定义
旋转轴由黑色箭头标识。正旋转方向由右手定则给出。例如,当轴 0 向正方向转动时,从上方看,机器人顺时针旋转。
轴 0、1、3 和 4:]-180°、180°[
轴 2:[-90°, 180°]
轴 5:不受限制;范围可能大于 360°。
归位位置和尺寸
左图显示了运动学的归位位置,即所有轴都处于零位的位置。在配置结构中指定指示的维度 SMC_TrafoConfig_ArticulatedRobot_6DOF.参数的名称和符号符合 Denavit-Hartenberg 约定。右图显示了附加的 Denavit–Hartenberg 参数 d3.
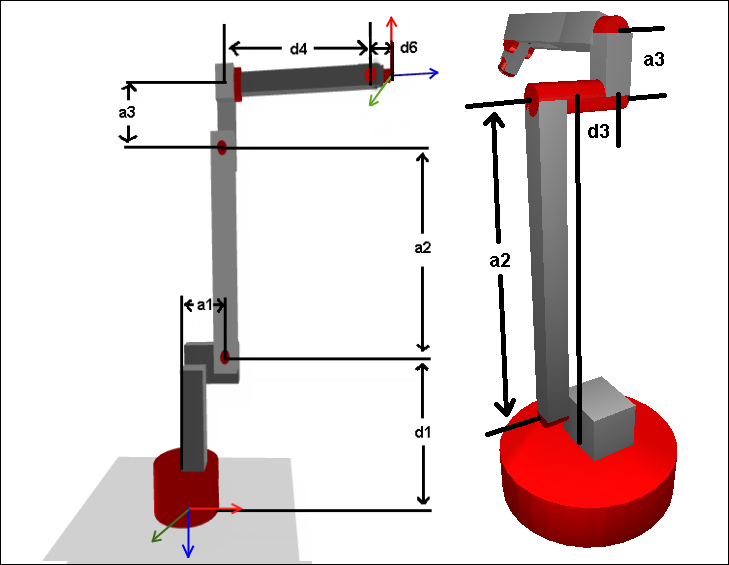
a1、a3、d4 和 d6 必须 >= 0
a2 必须 > 0 (>
g_fSMC_CNC_EPS)d1 必须 <= 0
关节偏移 (sigma_i) | 杠杆偏移 (d_i) | 杠杆长度 (a_i) | 杠杆旋转 (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d1 | a_1 | -90° |
2 | 90° | 0 | a2 | 0° |
3 | 0° | d3 | a_3 | 90° |
4 | 0° | d4 | 0 | 90° |
5 | 0° | 0 | 0 | -90° |
6 | 0° | d6 | 0 | 0° |
编程
刀具中心位置由X、Y、Z控制。X、Y、Z的单位与参数使用的相同 a_i 和 d_i (例如:毫米)。方向通过 A(偏航)、B(俯仰)和 C(滚动)以度数控制。
变换对象
数据结构 SMC_TrafoConfig_ArticulatedRobot_6DOF 和 SMC_Trafo_ArticulatedRobot_6DOF 和 SMC_TrafoF_ArticulatedRobot_6DOF 功能块链接到 SM3_CNC.