4 轴码垛机运动学
4 轴码垛机运动学是一种通用机器人类型,经常用于码垛任务。运动系统配备四个受控旋转轴(标记为红色)和第五个机械旋转轴(标记为灰色)。这 SMC_Trafo_4AxisPalletizer 和 SMC_TrafoF_4AxisPalletizer POU 实现了它的正向和逆变换。
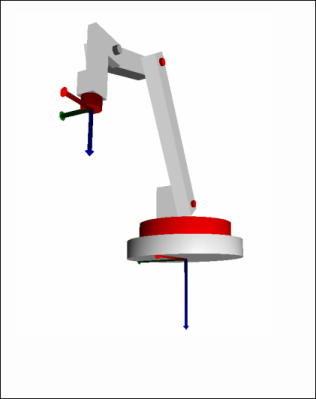
笛卡尔坐标系是码垛机的基础。 Z 轴垂直向下指向,X 轴“向前”,即手臂指向轴的零方向的方向。笛卡尔坐标系的原点是关节轴 1 与机器人底面的交点。
轴的定义
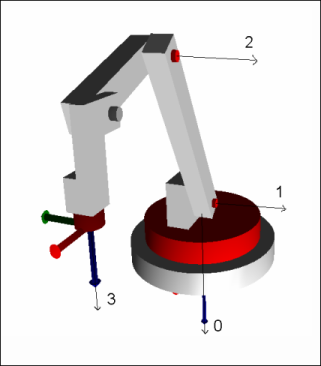
下图显示了四个轴的旋转方向。黑色箭头沿关节轴延伸。旋转方向根据右手定则确定:如果右手拇指沿箭头指向下方,则正旋转方向为手指微弯的方向。例如,从上面看时,轴 0 的正旋转方向是顺时针方向,而轴 1 和 2 则“向前”倾斜以进行正旋转。
运动学配有四个受控的旋转轴(参见红色轴 a0、a1、a2、a3)和第五个机械旋转轴(参见灰色轴 M)。
轴 0:]-180°、180°[
轴 1:[-90°,90°]
轴 2:[-180°,90[
轴 M:机械旋转轴。没有限制
轴 3:不受限制;范围也可以大于 360°
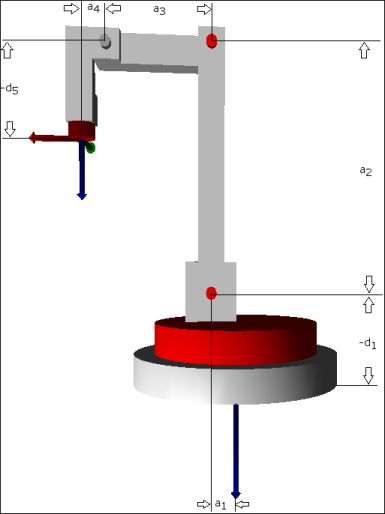
零位和尺寸
该图显示了所有轴的零位运动。在零位时,工具坐标系的轴平行于机床坐标系的轴。在配置结构中指定指示的维度 SMC_TrafoConfig_4AxisPalletizer 同时指定所有 a_i 有积极的迹象和所有 d_i 带有负号。参数的名称符合 Denavit-Hartenberg 约定。
关节偏移 (sigma_i) | 关节距离 (d_i) | 臂单元长度 (a_i) | 扭转 (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d_1 | 一个_1 | 90° |
2 | -90° | 0 | a2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | d_5 | 0 | 180° |
G代码编程
夹具的位置由 X、Y 和 Z 控制。夹具在垂直方向上的旋转由附加轴 C 控制。角度以度为单位指定。
对象
数据结构 SMC_TrafoConfig_4AxisPalletizer 和功能块 SMC_Trafo_4AxisPalletizer 和 SMC_TrafoF_4AxisPalletizer 链接到图书馆 SM3_Transformation.有关参数的说明,请在库管理器中搜索这些对象。