平行运动学
带线性轴的三脚架
该系统具有三个线性驱动器,它们彼此处于定义的角度。驱动器由 3 个带有横动滑块的导轨组成。工具板通过相同长度的连杆连接到横动滑块。一对连杆将工具板保持在同一方向上,与地板平行。运动学可以在三个维度上移动工具板。
这些运动学的正向和逆变换在 SMC_Trafo_Tripod_Lin 和 SMC_TrafoF_Tripod_Lin POU。三脚架的轴角由导轨与垂直轴之间的角度定义(dAxisAngle)。
机械要求和坐标系
3 个轴的长度相同。
连杆的长度相同。
连杆对之间的距离对于所有连杆都是相同的。
所有三个驱动器的驱动导轨和垂直轴之间的轴角相同。角度公差在 0° 和 90° 之间。
轴定义了滑块上连杆接头之间的点的移动。
XYZ 坐标系是右手坐标系。 X 和 Y 向量是水平的,Z 指向上方。定义原点,使三个运动轴与 XY 平面的交点(下图:点 A)位于位置 [0,0,0] 的圆上。
名称 | 描述 |
|---|---|
| 工具板中心到连杆夹持点的距离 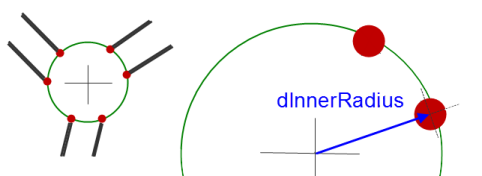 |
| 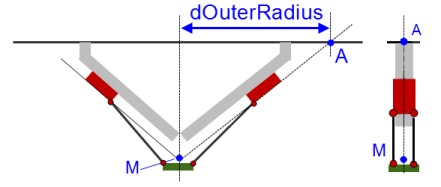 点 A 是轴与 XY 平面的交点。 |
| 连杆长度 |
| 一对中两根连杆之间的距离 |
| 默认情况下,第一个轴的 A 点定义 X 轴。偏移量用于围绕 Z 轴旋转整个结构。在这种情况下,点 A 不再位于 X 轴上。 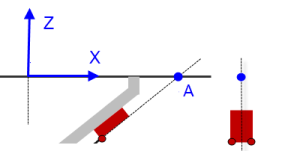 |
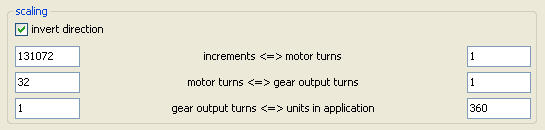
| 偏移量用于将轴的位置值设置为其默认设置零。 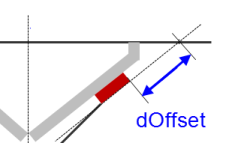 |
| |
| |
您将在库描述中找到有关其他参数的信息。 | |
带垂直轴的三脚架
该系统是上述运动学设计的特殊变体,具有相同的机械要求。角度 dAxisAngle 导轨与垂直轴的夹角为0°,导轨与垂直轴平行。
这些运动学的正向和逆变换在 SMC_Trafo_Tripod_Lin 和 SMC_TrafoF_Tripod_Lin 功能块。三脚架的轴角由导轨与垂直轴之间的角度定义(dAxisAngle)。
名称 | 描述 |
|---|---|
| 该参数定义了由连接杆与工具板的六个夹持点描述的圆的半径。 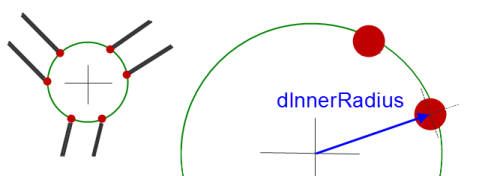 |
|  |
| 连杆长度 |
| 连杆对之间的距离 |
| 默认情况下,第一个轴的 A 点定义 X 轴。偏移量用于围绕 Z 轴旋转整个结构。在这种情况下,点 A 不再位于 X 轴上。 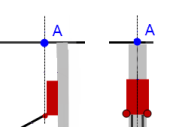 |
| 偏移量用于将轴的位置值设置为其默认设置零。 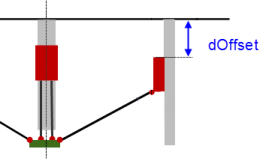 |
| |
| |
您将在库描述中找到有关其他参数的信息。 | |
带旋转轴的三脚架
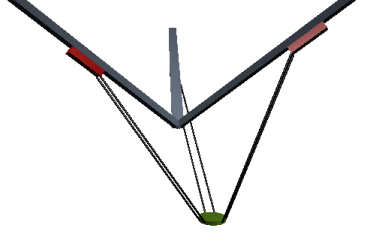
对于三脚架,运动学由 3 个旋转驱动器实现,这些旋转驱动器通过臂和连杆连接到工具板。
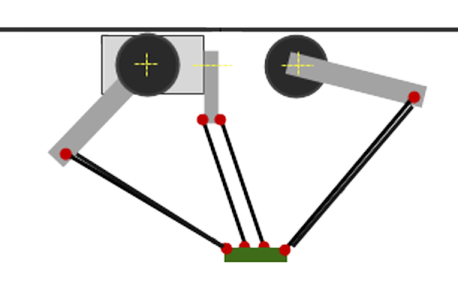
坐标系的原点是 3 个臂都处于水平位置时工具板中心的位置。
这些运动学的正向和逆变换在 SMC_TRAFO_Tripod_Arm 和 SMC_TRAFOF_Tripod_Arm 功能块。
机械要求和坐标系
三个轴的长度相同。
连杆的长度相同。
连杆对之间的距离对于所有连杆都是相同的。
名称 | 描述 |
|---|---|
| 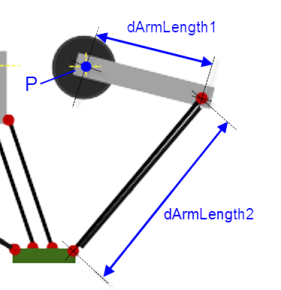 |
| |
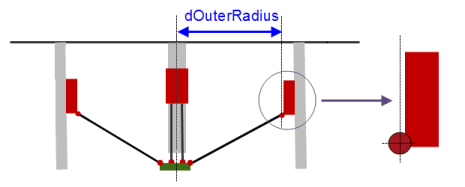
| 该参数定义了由驱动器的 3 个点 P 建立的圆的半径。 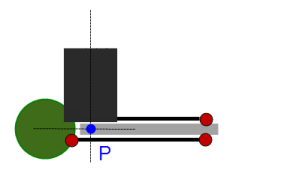 |
| 该参数定义了由连接杆到工具板的 6 个夹持点所描述的圆的半径。 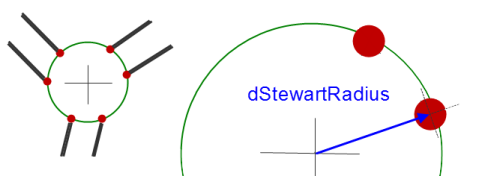 |
| 一对中两根连杆之间的距离 |
| |
| |
| |
您将在库描述中找到有关其他参数的信息。 | |
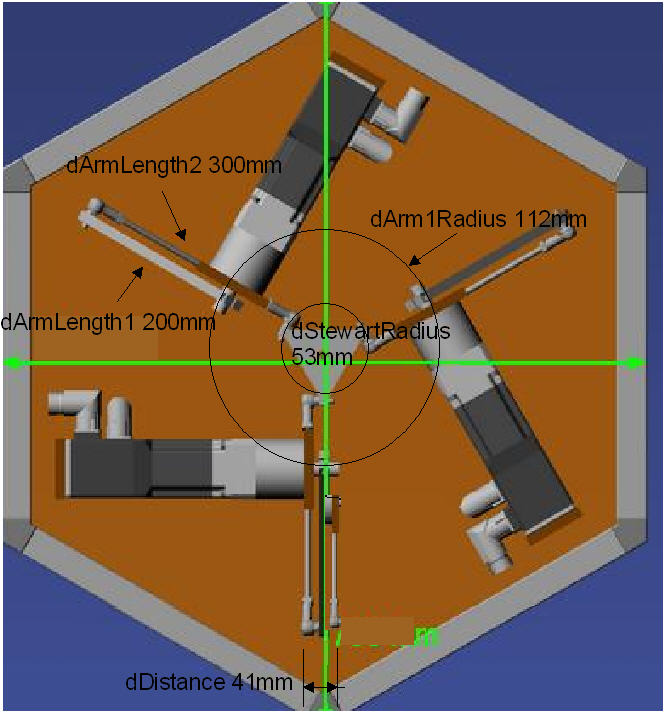
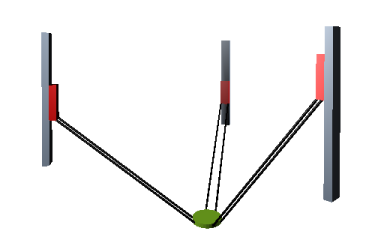
图像显示所有轴的零位。 (三个上臂是水平的。)MCS 显示在工具板上。 A0、A1 和 A2 轴上的箭头根据右手定则显示驱动器的旋转方向。
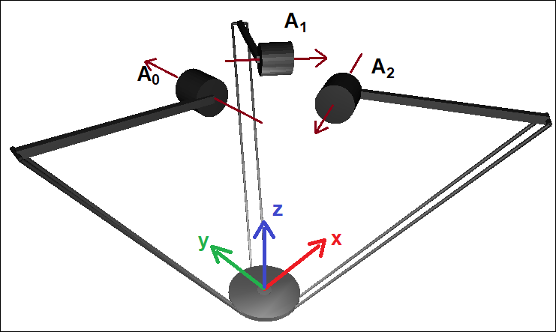
机器坐标系 (MCS) | |
起源 | 当所有 3 个上臂(与 A0、A1 或 A2 直接连接的那些)都处于水平位置时,定义在工具板的中点 |
X | 从原点,指向远离第一个电机 (A0),平行于第一个臂的上臂段 |
Y | 由 X 和 Z 确定,因此 MCS 是右手的 |
Z | 与工具板正交 从工具板指向电机方向的点 |
相应的转换由以下 POU 执行 SMC_TRAFO_Tripod_Arm 和 SMC_TRAFOF_Tripod_Arm:
转换设置
tta: SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60); ttaf: SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);