CP 运动的方向插值
在 CP 运动的情况下,例如 MC_MoveLinearAbsolute, MC_MoveLinearRelative, MC_MoveCircularAbsolute, 或者 MC_MoveCircularRelative,可以通过运动的目标位置指定工具的任何目标方向。结果是工具的方向在路径移动期间转换为目标方向,工具的尖端在路径上移动。对于定向插补,无论是轴坐标 (ACS) 还是机器坐标 (MCS),在哪个坐标系中给出目标定向都没有任何区别。
下图显示了带有同步定向插补的线性插补。红色箭头指示工具在起点和终点的方向。红色虚线表示工具在插补期间如何定位在某些位置。
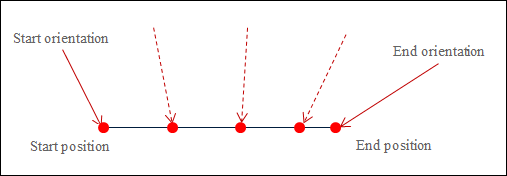
上面提到的用于路径移动的功能块具有 OrientationMode 输入。此输入定义了如何将起始方向传递到目标方向。
大圆插补(
SMC_Orientation_Mode.GreatCircle)这是默认设置。使用此设置,起始方向也会以最短距离传递到目标方向。最短距离意味着工具在目标方向上旋转,从而使旋转的行进角最小化。
轴方向插补(
SMC_Orientation_Mode.Axis)
考虑具有值范围为 -360° 到 360° 的 C 轴的龙门架。起始方位为 C=179°,目标方位为 C=-175°。大圆插补将 ZYZ 欧拉角 (A,B,C) 的 C 轴与路径上的行进距离成比例地从 179° 沿正方向移动,经过 180° 到 185°,对应于 -175°。在这种情况下,它的总角度为 6°。
再次考虑具有值范围为 -180° 到 180° 的 C 轴的龙门架。起始方位为 C=179°,目标方位为 C=-175°。轴插补将龙门的 C 轴与路径上的行进距离成比例地移动,从负方向 179° 越过 0° 到 -175°,总角度为 354°。 (如果在本例中使用大圆插补,则会发生错误,因为会超出 C 轴的工作空间。)
在大圆插补中,可以预测刀具方向的变化。在轴插补中,很难预测方向的变化,因为方向轴会根据位置对方向产生不同的影响。轴定向插补与 PTP 运动共享此特性。 (然而,这并不意味着轴定向插补的空间路径难以预测。两种定向插补的路径相同,TCP 始终精确地移动定义的轮廓。)
使用大圆插补时,方向运动学中的奇点无法移动。这可以通过轴插补轻松实现。
在大圆插补中,可能导致违反定位轴的轴限位,如第二个示例所述。因此,在发出命令时,需要确保以最短旋转移动到目标定位时不会违反轴限位。
使用轴插补,可以旋转超过 360°。如果方向轴的工作空间大于 360°,那么您可以移动到例如 540° 的位置,而不是 180° 的位置。这对应于相同的工具方向。使用大圆插补,这是不可能的。到目标方向的最短旋转始终最多对应于 180° 的总角度。
轴定向插补需要由位置运动学和刀具运动学组成的耦合运动学。位置部分必须实现接口
ISMPositionKinematics_Offset2.如果运动系统没有任何旋转轴并且它们实现了接口
ISMPositionKinematics,然后选择的方向模式 (SMC_Orientation_Mode) 被忽略。
轴方向插补中的奇点
通过轴定向插补,可以通过定向运动学的奇异点进行路径运动,这可以显着简化编程。为此,位置运动学的奇异性会发生变化。
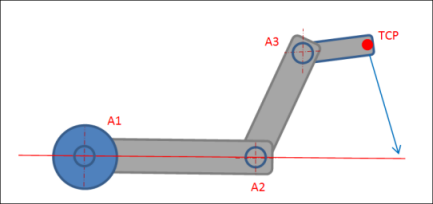
在大圆弧插补的情况下,如果法兰点 (A3) 位于第一个臂部分定义的线上(如果第二个关节角度为 0°),则 Scara3_Z 具有奇异性。
对于轴方向插补,位置运动学的奇异点会发生变化,因此 TCP 承担法兰点 (A3) 所具有的其他角色。当 TCP(不是法兰点)位于由第一个臂部分定义的线上时,就会出现这种奇点。当指令带有轴方向插补的运动时,检查这个改变的奇异点是否位于运动的起始位置和目标位置之间。如果是,则不接受移动并发出错误。
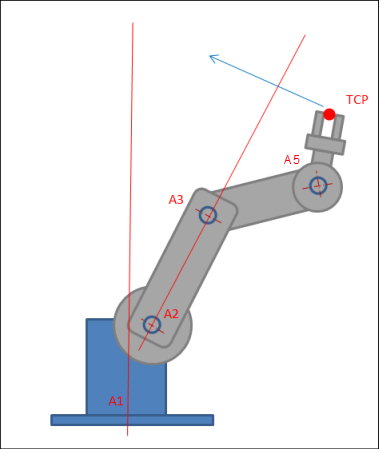
对于 6 轴关节臂机器人,情况与 Scara3_Z 相当,但可能存在两个奇点。第一种发生在 TCP 位于通过 A2 和 A3 的线路上时。第二个发生在 TCP 位于通过 A1 的线路上时。指挥部还会在这里检查是否没有穿越奇点。
提示
使用轴方向插补移动时,Scara3(或 6 轴关节臂机器人)的配置可能会发生变化。但是,在运动结束时,始终应用机器人在起点时的相同配置。