标签:常规
轴类型 | |
虚拟模式 |
注意:您也可以通过 IEC 代码设置和重置驱动器的虚拟模式 |
模数 |
模值 [u]:一个周期的值(模周期) 该值保存在 注意:如果您选择 模数 驱动器类型,然后是产品 |
有限 |
软件限位开关 活性
|
马达类型 | |
扶轮社 |
|
线性 |
|
速度斜坡类型 定义运动生成单轴和主/从模块的速度曲线: 注意:坡道类型 Sin² 和 二次曲线(平滑) 不支持机器人。 | |
梯形 |
|
Sin² |
|
二次的 |
|
二次曲线(平滑) |
|
识别 | |
身份证 | 整数标识符。每个驱动器都应该是唯一的。例如,在 PLC 日志中使用此标识符以便在发生错误时识别驱动器。 |
死亡时间 | |
周期 | 两者之间的循环中断时间 |
动态极限 考虑了 PLCOpen 第 4 部分 POU 中的极限值。此外,它们由名为的库 POU 使用 | |
速度 [u/s] | 速度、加速度、减速和加速度极限值 |
加速 [u/s²] | |
减速 [u/s²] | |
混蛋 [u/s³] | |


软件限制 | |
已激活 |
|
软件错误反应 . 软件错误的原因
对于软件错误反应, 减速, 马克斯。距离,并考虑了动态极限的减速。减速也是根据最大距离计算的。这些减速值中的最高值用于误差斜坡 | |
减速 [u/s²]: | 错误斜坡的减速 |
最大距离 [u] | 可选 发生错误后,驱动器必须在该距离内处于停顿状态。 |
位置延迟监控 系统对检测到的延迟的响应。 当设定位置和补偿后的实际位置之间的差异超过延迟限制时,就会检测到延迟。外推的实际位置按以下公式计算
该值是轴的实际位置,由死区时间补偿。 注意:如果您正在监视延迟,则应确定并输入空闲时间。有关描述,请参阅以下章节: 实际值、设定值和空闲时间。 注意:延迟监控不适用于虚拟驱动器。 | |
已停用 | 没有回应 延迟监控已停用。 |
禁用驱动器 | 这个 |
快停 | 这个 |
保持启用状态 | 驱动器保持开启状态,但所有跑步动作都会突然停止。 |
延迟限制: | 控制器中的延迟监控 驱动器中也可以存在独立监控,但未在此对话框中进行配置。 |
有关详细信息,请参阅: 确定系统的死区时间
下图展示了不同斜坡类型的效果。位置以绿色绘制,速度以蓝色绘制,加速度以红色绘制。
梯形 速度是部分线性和连续的,而部分恒定的加速度表示跳跃。 | 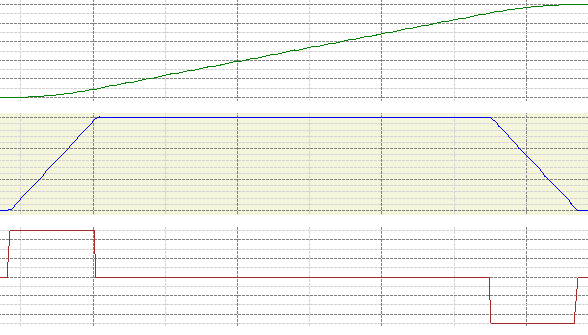 |
罪² 速度曲线中的中断被平滑(通过使用 sin² 函数而不是线)以减少加速度的跳跃。 用户不能限制这种斜坡类型的加加速度。仅当运动开始时加速度不为零且中断的减速和加速斜坡无法无缝继续时,设置的最大加加速度才有效。然后,考虑到加加速度限制,在当前运动开始之前,加速度减小到零。与梯形速度曲线相比,在这种情况下减速需要更多时间。 | 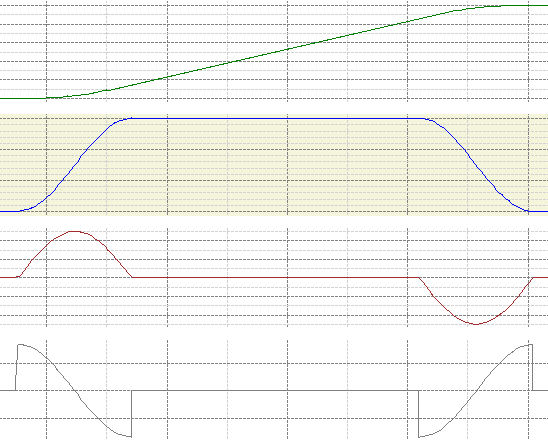 |
二次方 加速度是部分线性和连续的,并且加速度有跳跃。速度由二次段和线性段组成。 | 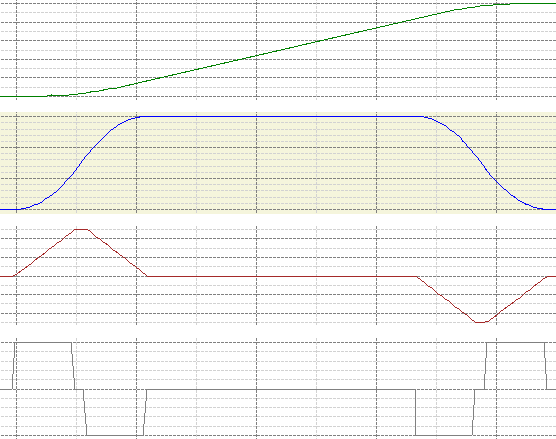 |
二次(平滑) 二次斜坡类型的线性加速度斜坡被一个“平滑”函数取代,在开始和结束时斜率值为零。因此,加加速度也是连续的。 注意:如果运动被中断,则可能导致挺举中断。 | 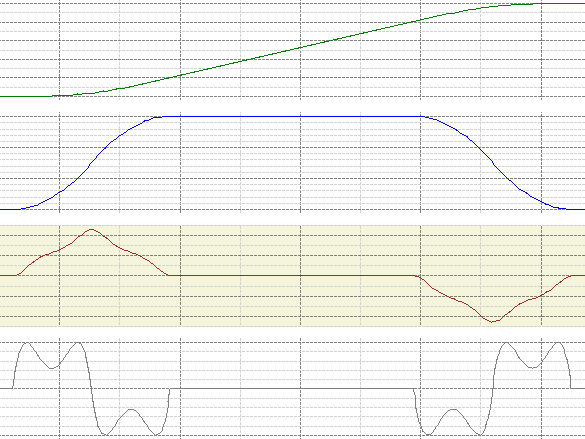 |
有关更多信息,请参阅: 动作中断