运动学配置
运动学配置描述了轴组中轴的相互布局。根据运动学的不同,同一个 TCP 位置可以有多种配置。
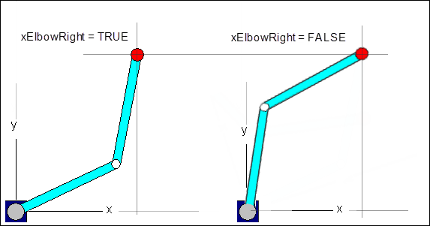
例如,SCARA 2 显示了两种可能的配置。
轴组有一个活动配置,不一定必须与当前轴位置相对应。如果命令移动,则可以将目标位置转换为轴坐标。使用在命令时有效的配置。
可以使用功能块设置此活动配置 SMC_SetKinConfiguration.在初始化期间以及每次更改运动系统时,轴组都会应用标准配置。所有具有配置的运动学都具有标准配置。
提示
两种配置之间的 CP 移动是不可能的。在这种情况下,定位必须通过 PTP 运动来完成。
提示
当前配置可通过功能块确定 MC_GroupReadActualPosition.
为一种运动学设计设置配置
每个具有配置的运动学设计都有自己的用于计算配置数据的 POU。此功能块的名称对应于运动学名称加上后缀 _config. POU 将不同的配置转换为数据类型 ConfigData.此数据类型被传递给功能块 SMC_SetKinConfiguration.
例 55. 示例:为 SCARA 2 运动学设计设置配置
调用功能块
Kin_Scara2_Z_Config从图书馆SM3_Transformation.输入xElbowRight= 真功能块产生类型的配置数据
ConfigData.调用功能块
SMC_SetKinConfiguration从图书馆SM3_Robotics.写输入ConfigData与先前确定的配置数据。设置 SCARA 2 的活动配置。
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);耦合运动学的处理
当同时使用位置运动学和定向运动学时,存在耦合运动学。这会通过调用从两种配置中产生“耦合”配置 Kin_Coupled_Config 从图书馆 SM3_Transformation.位置运动学和定向运动学的配置在输入端提供给功能块。
有关更多信息,请参阅: 值范围超过 360° 的旋转轴